 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGazePrior: Zero-Shot AR/VR Eye Tracking via Learned 3D Gaze Reconstruction
May 21, 2026Eye tracking (ET) is a foundational technology for advanced AR/VR applications. However, training ET models for every new ET device is challenging: real data collection is costly and time-consuming, while existing synthetic data generation methods lack realism. To remove the need for additional data collection while maintaining data quality, we introduce a data-driven 3D prior that models the distribution of human eyes across diverse identities, gaze directions, and light settings. This model, which we coin GazePrior, then enables sparse-input 3D reconstruction of annotated data collected with previous ET devices, which can in turn be rendered from the cameras of any target ET device. Our approach synthesizes data with the realism, diversity and ground-truth accuracy of real data collection without its prohibitive costs. Our experiments demonstrate that ET models trained with our synthesized data outperform previous zero-shot methods, achieving higher accuracy and robustness.
Establishing Robust Retinal Eye Tracking: A Weakly Supervised Algorithmic Framework
May 09, 2026Retinal image-based eye tracking is widely used in ophthalmic imaging and vision science, and is a promising path to deliver higher gaze accuracy than the pupil- and cornea-based approaches commonly used in modern AR/VR devices. Nevertheless, existing retinal tracking algorithms still primarily rely on classical template-matching registration, which can be insufficiently robust to retinal feature variability and real-world imaging conditions. In this work, we propose a novel weakly-supervised, learning-based framework for robust retinal eye tracking. Initial studies demonstrate high accuracy, achieving the 95th-percentile gaze error < 0.45 deg across a cohort of 6 participants.
Polarization-Based Eye Tracking with Personalized Siamese Architectures
Mar 26, 2026Head-mounted devices integrated with eye tracking promise a solution for natural human-computer interaction. However, they typically require per-user calibration for optimal performance due to inter-person variability. A differential personalization approach using Siamese architectures learns relative gaze displacements and reconstructs absolute gaze from a small set of calibration frames. In this paper, we benchmark Siamese personalization on polarization-enabled eye tracking. For benchmarking, we use a 338-subject dataset captured with a polarization-sensitive camera and 850 nm illumination. We achieve performance comparable to linear calibration with 10-fold fewer samples. Using polarization inputs for Siamese personalization reduces gaze error by up to 12% compared to near-infrared (NIR)-based inputs. Combining Siamese personalization with linear calibration yields further improvements of up to 13% over a linearly calibrated baseline. These results establish Siamese personalization as a practical approach enabling accurate eye tracking.
Enhancing Eye Feature Estimation from Event Data Streams through Adaptive Inference State Space Modeling
Mar 14, 2026Eye feature extraction from event-based data streams can be performed efficiently and with low energy consumption, offering great utility to real-world eye tracking pipelines. However, few eye feature extractors are designed to handle sudden changes in event density caused by the changes between gaze behaviors that vary in their kinematics, leading to degraded prediction performance. In this work, we address this problem by introducing the \emph{adaptive inference state space model} (AISSM), a novel architecture for feature extraction that is capable of dynamically adjusting the relative weight placed on current versus recent information. This relative weighting is determined via estimates of the signal-to-noise ratio and event density produced by a complementary \emph{dynamic confidence network}. Lastly, we craft and evaluate a novel learning technique that improves training efficiency. Experimental results demonstrate that the AISSM system outperforms state-of-the-art models for event-based eye feature extraction.
Polarization-resolved imaging improves eye tracking
Nov 06, 2025Polarization-resolved near-infrared imaging adds a useful optical contrast mechanism to eye tracking by measuring the polarization state of light reflected by ocular tissues in addition to its intensity. In this paper we demonstrate how this contrast can be used to enable eye tracking. Specifically, we demonstrate that a polarization-enabled eye tracking (PET) system composed of a polarization--filter--array camera paired with a linearly polarized near-infrared illuminator can reveal trackable features across the sclera and gaze-informative patterns on the cornea, largely absent in intensity-only images. Across a cohort of 346 participants, convolutional neural network based machine learning models trained on data from PET reduced the median 95th-percentile absolute gaze error by 10--16\% relative to capacity-matched intensity baselines under nominal conditions and in the presence of eyelid occlusions, eye-relief changes, and pupil-size variation. These results link light--tissue polarization effects to practical gains in human--computer interaction and position PET as a simple, robust sensing modality for future wearable devices.
Digitally Prototype Your Eye Tracker: Simulating Hardware Performance using 3D Synthetic Data
Mar 20, 2025



Eye tracking (ET) is a key enabler for Augmented and Virtual Reality (AR/VR). Prototyping new ET hardware requires assessing the impact of hardware choices on eye tracking performance. This task is compounded by the high cost of obtaining data from sufficiently many variations of real hardware, especially for machine learning, which requires large training datasets. We propose a method for end-to-end evaluation of how hardware changes impact machine learning-based ET performance using only synthetic data. We utilize a dataset of real 3D eyes, reconstructed from light dome data using neural radiance fields (NeRF), to synthesize captured eyes from novel viewpoints and camera parameters. Using this framework, we demonstrate that we can predict the relative performance across various hardware configurations, accounting for variations in sensor noise, illumination brightness, and optical blur. We also compare our simulator with the publicly available eye tracking dataset from the Project Aria glasses, demonstrating a strong correlation with real-world performance. Finally, we present a first-of-its-kind analysis in which we vary ET camera positions, evaluating ET performance ranging from on-axis direct views of the eye to peripheral views on the frame. Such an analysis would have previously required manufacturing physical devices to capture evaluation data. In short, our method enables faster prototyping of ET hardware.
Deep Domain Adaptation: A Sim2Real Neural Approach for Improving Eye-Tracking Systems
Mar 23, 2024Eye image segmentation is a critical step in eye tracking that has great influence over the final gaze estimate. Segmentation models trained using supervised machine learning can excel at this task, their effectiveness is determined by the degree of overlap between the narrow distributions of image properties defined by the target dataset and highly specific training datasets, of which there are few. Attempts to broaden the distribution of existing eye image datasets through the inclusion of synthetic eye images have found that a model trained on synthetic images will often fail to generalize back to real-world eye images. In remedy, we use dimensionality-reduction techniques to measure the overlap between the target eye images and synthetic training data, and to prune the training dataset in a manner that maximizes distribution overlap. We demonstrate that our methods result in robust, improved performance when tackling the discrepancy between simulation and real-world data samples.
Structured learning of sum-of-submodular higher order energy functions
Oct 01, 2013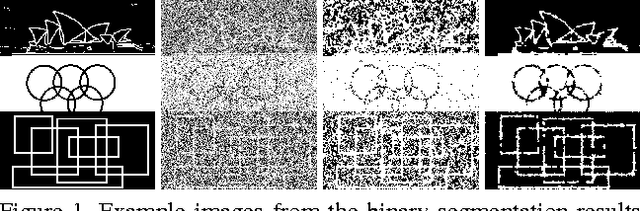
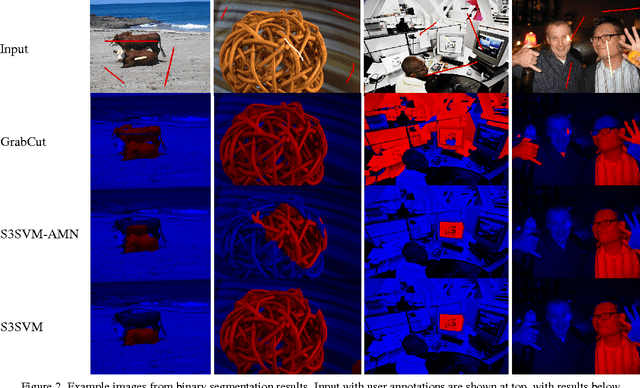
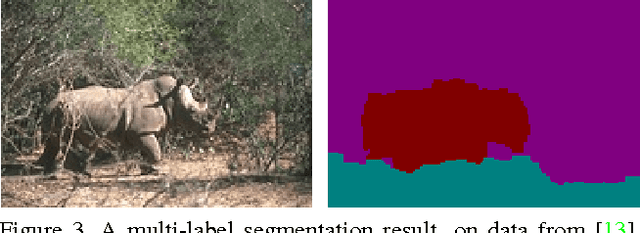
Submodular functions can be exactly minimized in polynomial time, and the special case that graph cuts solve with max flow \cite{KZ:PAMI04} has had significant impact in computer vision \cite{BVZ:PAMI01,Kwatra:SIGGRAPH03,Rother:GrabCut04}. In this paper we address the important class of sum-of-submodular (SoS) functions \cite{Arora:ECCV12,Kolmogorov:DAM12}, which can be efficiently minimized via a variant of max flow called submodular flow \cite{Edmonds:ADM77}. SoS functions can naturally express higher order priors involving, e.g., local image patches; however, it is difficult to fully exploit their expressive power because they have so many parameters. Rather than trying to formulate existing higher order priors as an SoS function, we take a discriminative learning approach, effectively searching the space of SoS functions for a higher order prior that performs well on our training set. We adopt a structural SVM approach \cite{Joachims/etal/09a,Tsochantaridis/etal/04} and formulate the training problem in terms of quadratic programming; as a result we can efficiently search the space of SoS priors via an extended cutting-plane algorithm. We also show how the state-of-the-art max flow method for vision problems \cite{Goldberg:ESA11} can be modified to efficiently solve the submodular flow problem. Experimental comparisons are made against the OpenCV implementation of the GrabCut interactive segmentation technique \cite{Rother:GrabCut04}, which uses hand-tuned parameters instead of machine learning. On a standard dataset \cite{Gulshan:CVPR10} our method learns higher order priors with hundreds of parameter values, and produces significantly better segmentations. While our focus is on binary labeling problems, we show that our techniques can be naturally generalized to handle more than two labels.