 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing Humans, GPT-4, and GPT-4V On Abstraction and Reasoning Tasks
Nov 26, 2023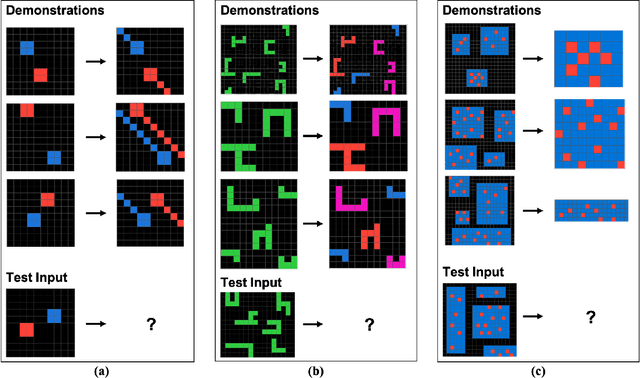
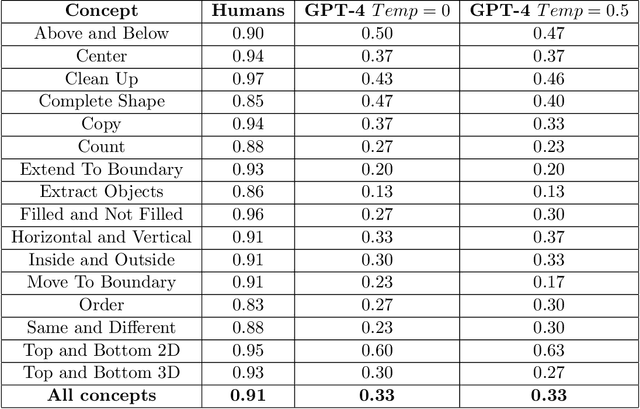

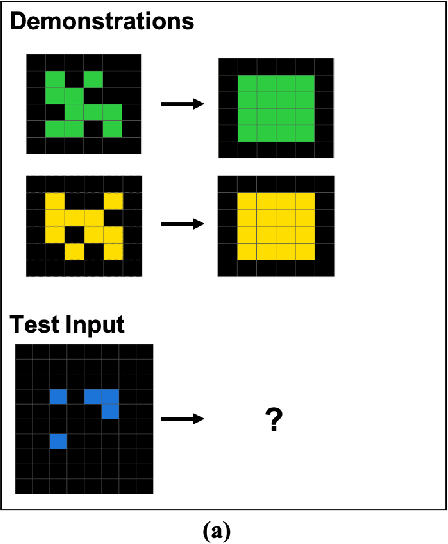
We explore the abstract reasoning abilities of text-only and multimodal versions of GPT-4, using the ConceptARC benchmark [10], which is designed to evaluate robust understanding and reasoning with core-knowledge concepts. We extend the work of Moskvichev et al. [10] by evaluating GPT-4 on more detailed, one-shot prompting (rather than simple, zero-shot prompts) with text versions of ConceptARC tasks, and by evaluating GPT-4V, the multimodal version of GPT-4, on zero- and one-shot prompts using image versions of the simplest tasks. Our experimental results support the conclusion that neither version of GPT-4 has developed robust abstraction abilities at humanlike levels.
DreamDecompiler: Improved Bayesian Program Learning by Decompiling Amortised Knowledge
Jun 13, 2023Solving program induction problems requires searching through an enormous space of possibilities. DreamCoder is an inductive program synthesis system that, whilst solving problems, learns to simplify search in an iterative wake-sleep procedure. The cost of search is amortised by training a neural search policy, reducing search breadth and effectively "compiling" useful information to compose program solutions across tasks. Additionally, a library of program components is learnt to express discovered solutions in fewer components, reducing search depth. In DreamCoder, the neural search policy has only an indirect effect on the library learnt through the program solutions it helps discover. We present an approach for library learning that directly leverages the neural search policy, effectively "decompiling" its amortised knowledge to extract relevant program components. This provides stronger amortised inference: the amortised knowledge learnt to reduce search breadth is now also used to reduce search depth. We integrate our approach with DreamCoder and demonstrate faster domain proficiency with improved generalisation on a range of domains, particularly when fewer example solutions are available.