 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbedding of FRPN in CNN architecture
Dec 27, 2019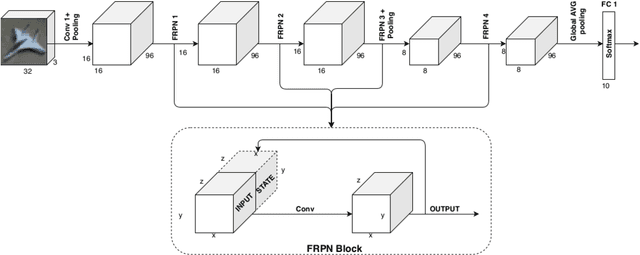
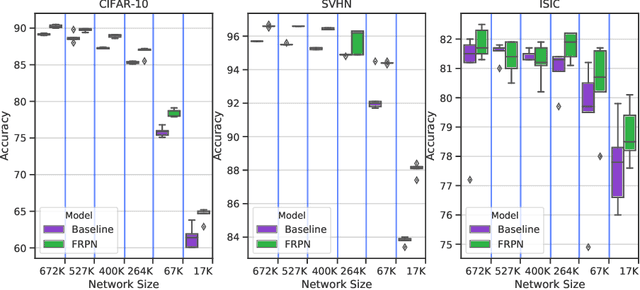
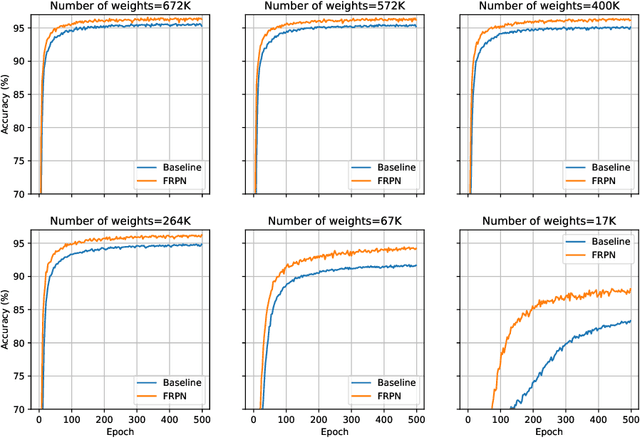
This paper extends the fully recursive perceptron network (FRPN) model for vectorial inputs to include deep convolutional neural networks (CNNs) which can accept multi-dimensional inputs. A FRPN consists of a recursive layer, which, given a fixed input, iteratively computes an equilibrium state. The unfolding realized with this kind of iterative mechanism allows to simulate a deep neural network with any number of layers. The extension of the FRPN to CNN results in an architecture, which we call convolutional-FRPN (C-FRPN), where the convolutional layers are recursive. The method is evaluated on several image classification benchmarks. It is shown that the C-FRPN consistently outperforms standard CNNs having the same number of parameters. The gap in performance is particularly large for small networks, showing that the C-FRPN is a very powerful architecture, since it allows to obtain equivalent performance with fewer parameters when compared with deep CNNs.
Modeling Taxi Drivers' Behaviour for the Next Destination Prediction
Jul 21, 2018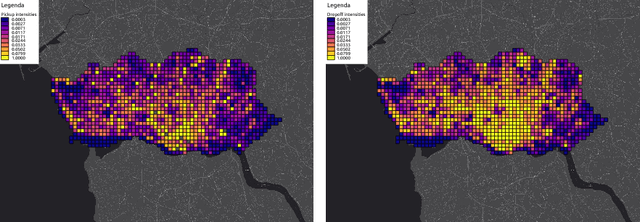
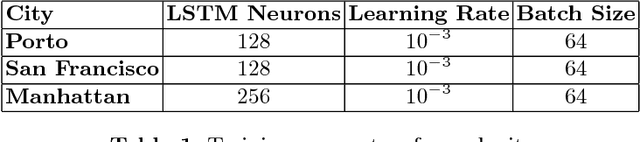
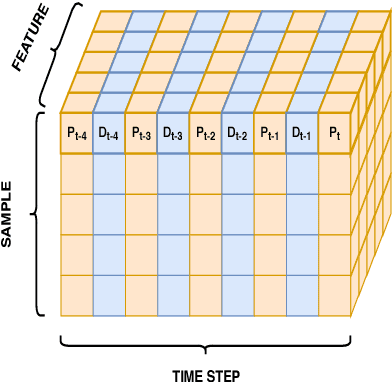
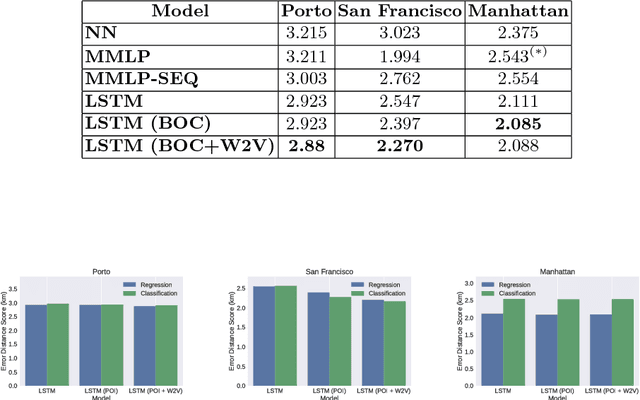
Taxi destination prediction is a very important task for optimizing the efficiency of electronic dispatching systems, thus allowing relevant advantages for both taxi companies and customers. In fact, during periods of high demand, there should be a taxi whose current ride will end near a requested pick up location from a new customer. If an electronic dispatcher is able to know in advance where all taxi drivers will end their current ride, it will also be able to better allocate its resources, identifying which taxi to assign to each call. Moreover, automatic systems for the taxi mobility monitoring collect data that, integrated with other information sources, can help in understanding daytime human mobility routines. In this paper, we introduce a novel approach for addressing the taxi destination prediction problem, based on Recurrent Neural Networks (RNNs) applied to a regression setting. RNNs are trained based on the individual drivers' history and on geographical information (i.e., points of interest), using only the starting point of each ride (with no knowledge about the whole trajectory). The proposed approach was tested on the dataset of the ECML/PKDD Discovery Challenge 2015 - based on the city of Porto - obtaining better results with respect to the competition winner, whilst using less information, and on Manhattan and San Francisco datasets.