 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent Collective Construction using 3D Decomposition
Sep 02, 2023



This paper addresses a Multi-Agent Collective Construction (MACC) problem that aims to build a three-dimensional structure comprised of cubic blocks. We use cube-shaped robots that can carry one cubic block at a time, and move forward, reverse, left, and right to an adjacent cell of the same height or climb up and down one cube height. To construct structures taller than one cube, the robots must build supporting stairs made of blocks and remove the stairs once the structure is built. Conventional techniques solve for the entire structure at once and quickly become intractable for larger workspaces and complex structures, especially in a multi-agent setting. To this end, we present a decomposition algorithm that computes valid substructures based on intrinsic structural dependencies. We use Mixed Integer Linear Programming (MILP) to solve for each of these substructures and then aggregate the solutions to construct the entire structure. Extensive testing on 200 randomly generated structures shows an order of magnitude improvement in the solution computation time compared to an MILP approach without decomposition. Additionally, compared to Reinforcement Learning (RL) based and heuristics-based approaches drawn from the literature, our solution indicates orders of magnitude improvement in the number of pick-up and drop-off actions required to construct a structure. Furthermore, we leverage the independence between substructures to detect which sub-structures can be built in parallel. With this parallelization technique, we illustrate a further improvement in the number of time steps required to complete building the structure. This work is a step towards applying multi-agent collective construction for real-world structures by significantly reducing solution computation time with a bounded increase in the number of time steps required to build the structure.
A Local Optimization Framework for Multi-Objective Ergodic Search
Jul 06, 2022

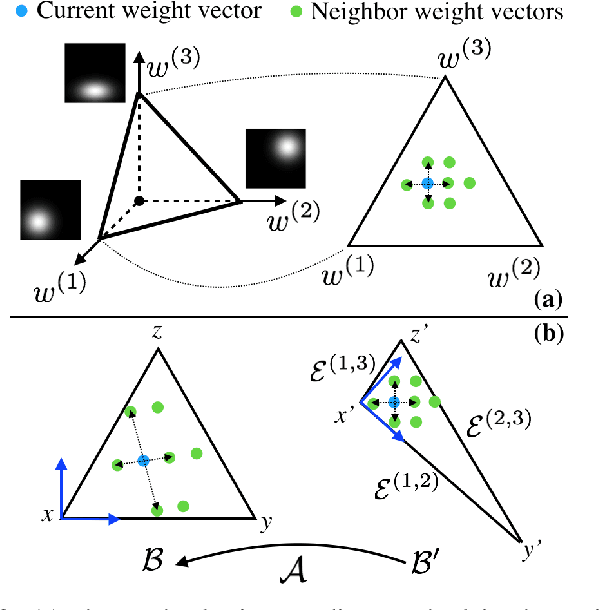
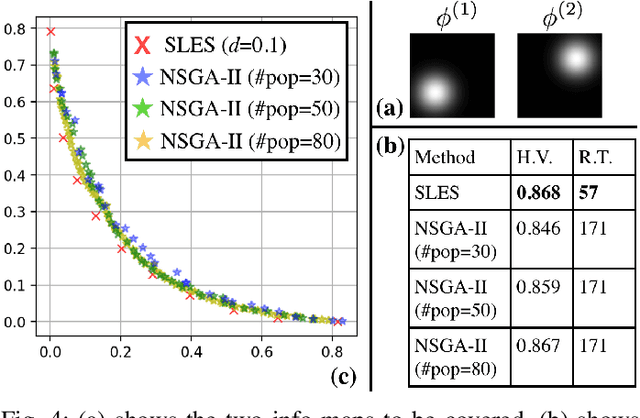
Robots have the potential to perform search for a variety of applications under different scenarios. Our work is motivated by humanitarian assistant and disaster relief (HADR) where often it is critical to find signs of life in the presence of conflicting criteria, objectives, and information. We believe ergodic search can provide a framework for exploiting available information as well as exploring for new information for applications such as HADR, especially when time is of the essence. Ergodic search algorithms plan trajectories such that the time spent in a region is proportional to the amount of information in that region, and is able to naturally balance exploitation (myopically searching high-information areas) and exploration (visiting all locations in the search space for new information). Existing ergodic search algorithms, as well as other information-based approaches, typically consider search using only a single information map. However, in many scenarios, the use of multiple information maps that encode different types of relevant information is common. Ergodic search methods currently do not possess the ability for simultaneous nor do they have a way to balance which information gets priority. This leads us to formulate a Multi-Objective Ergodic Search (MOES) problem, which aims at finding the so-called Pareto-optimal solutions, for the purpose of providing human decision makers various solutions that trade off between conflicting criteria. To efficiently solve MOES, we develop a framework called Sequential Local Ergodic Search (SLES) that converts a MOES problem into a "weight space coverage" problem. It leverages the recent advances in ergodic search methods as well as the idea of local optimization to efficiently approximate the Pareto-optimal front. Our numerical results show that SLES runs distinctly faster than the baseline methods.