 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe STRANDS Project: Long-Term Autonomy in Everyday Environments
Oct 14, 2016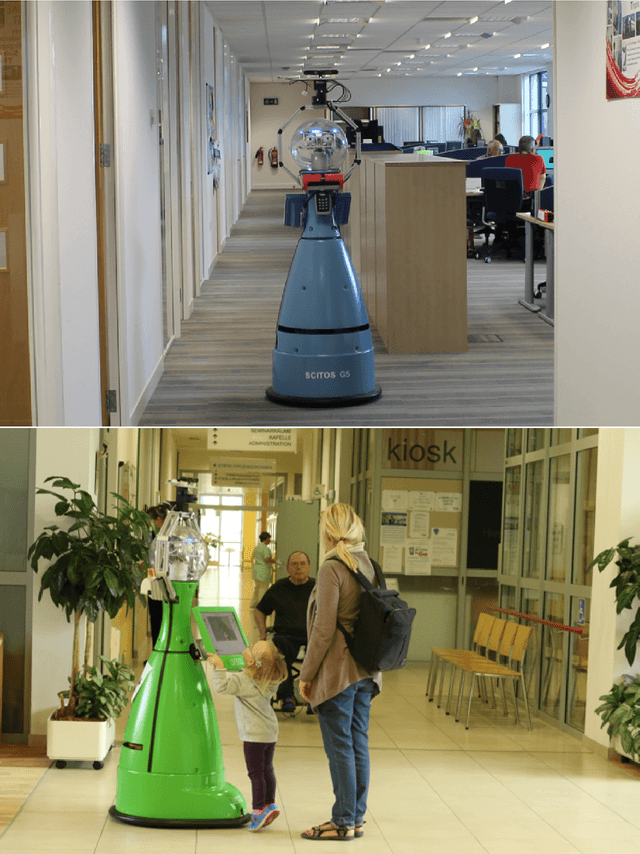
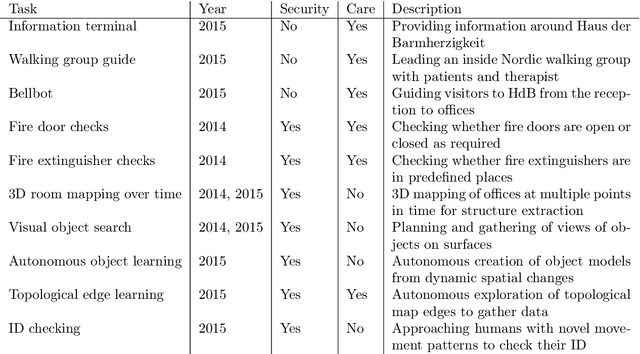
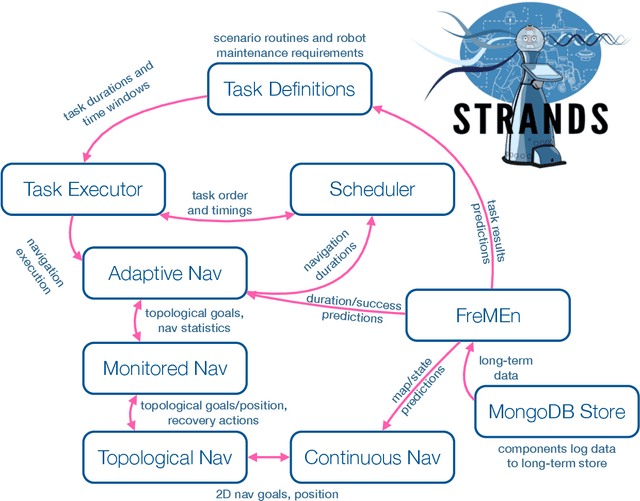
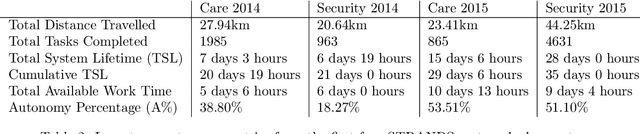
Thanks to the efforts of the robotics and autonomous systems community, robots are becoming ever more capable. There is also an increasing demand from end-users for autonomous service robots that can operate in real environments for extended periods. In the STRANDS project we are tackling this demand head-on by integrating state-of-the-art artificial intelligence and robotics research into mobile service robots, and deploying these systems for long-term installations in security and care environments. Over four deployments, our robots have been operational for a combined duration of 104 days autonomously performing end-user defined tasks, covering 116km in the process. In this article we describe the approach we have used to enable long-term autonomous operation in everyday environments, and how our robots are able to use their long run times to improve their own performance.
Object Modelling with a Handheld RGB-D Camera
May 21, 2015
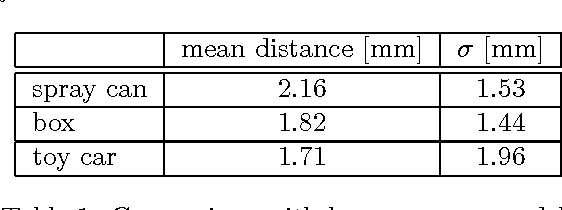
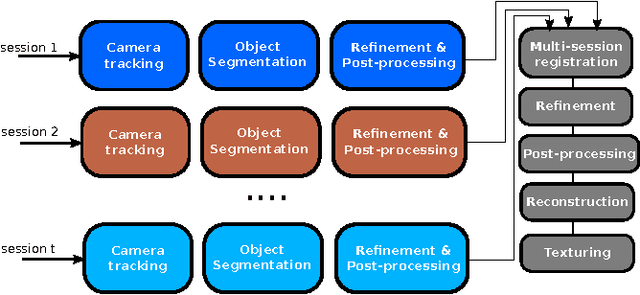
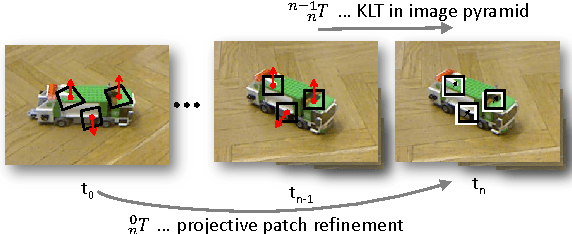
This work presents a flexible system to reconstruct 3D models of objects captured with an RGB-D sensor. A major advantage of the method is that our reconstruction pipeline allows the user to acquire a full 3D model of the object. This is achieved by acquiring several partial 3D models in different sessions that are automatically merged together to reconstruct a full model. In addition, the 3D models acquired by our system can be directly used by state-of-the-art object instance recognition and object tracking modules, providing object-perception capabilities for different applications, such as human-object interaction analysis or robot grasping. The system does not impose constraints in the appearance of objects (textured, untextured) nor in the modelling setup (moving camera with static object or a turn-table setup). The proposed reconstruction system has been used to model a large number of objects resulting in metrically accurate and visually appealing 3D models.