 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExternal Human-Machine Interface on Delivery Robots: Expression of Navigation Intent of the Robot
Aug 06, 2021
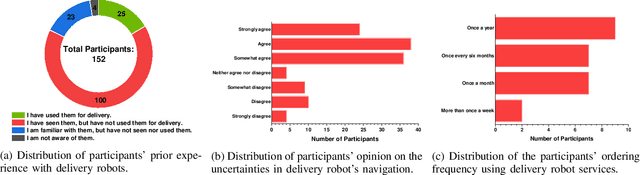

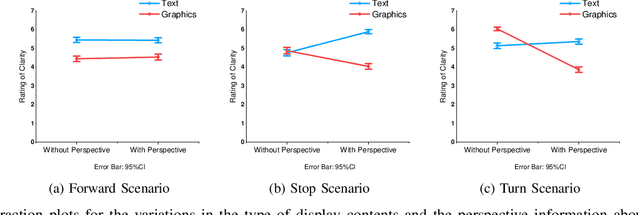
External Human-Machine Interfaces (eHMI) are widely used on robots and autonomous vehicles to convey the machine's intent to humans. Delivery robots are getting common, and they share the sidewalk along with the pedestrians. Current research has explored the design of eHMI and its effectiveness for social robots and autonomous vehicles, but the use of eHMIs on delivery robots still remains unexplored. There is a knowledge gap on the effective use of eHMIs on delivery robots for indicating the robot's navigational intent to the pedestrians. An online survey with 152 participants was conducted to investigate the comprehensibility of the display and light-based eHMIs that convey the delivery robot's navigational intent under common navigation scenarios. Results show that display is preferred over lights in conveying the intent. The preferred type of content to be displayed varies according to the scenarios. Additionally, light is preferred as an auxiliary eHMI to present redundant information. The findings of this study can contribute to the development of future designs of eHMI on delivery robots.
Investigating the Effect of Deictic Movements of a Multi-robot
Jun 06, 2020

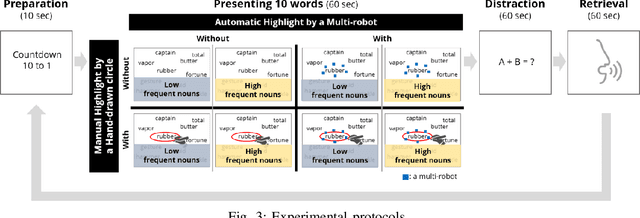
Multi-robot systems are made up of a team of multiple robots, which provides the advantage of performing complex tasks with high efficiency, flexibility, and robustness. Although research on human-robot interaction is ongoing as robots become more readily available and easier to use, the study of interactions between a human and multiple robots represents a relatively new field of research. In particular, how multi-robots could be used for everyday users has not been extensively explored. Additionally, the impact of the characteristics of multiple robots on human perception and cognition in human multi-robot interaction should be further explored. In this paper, we specifically focus on the benefits of physical affordances generated by the movements of multi-robots, and investigate the effects of deictic movements of multi-robots on information retrieval by conducting a delayed free recall task.
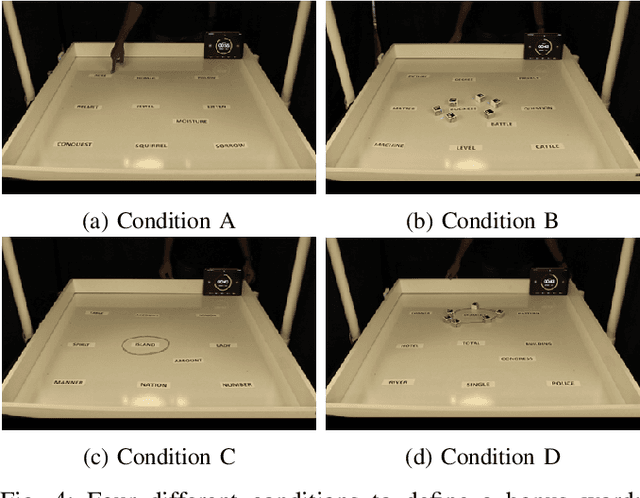
A ROS-based Framework for Monitoring Human and Robot Conditions in a Human-Multi-robot Team
Jun 06, 2020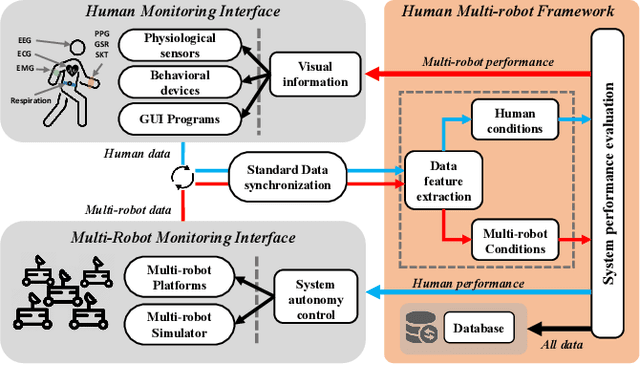
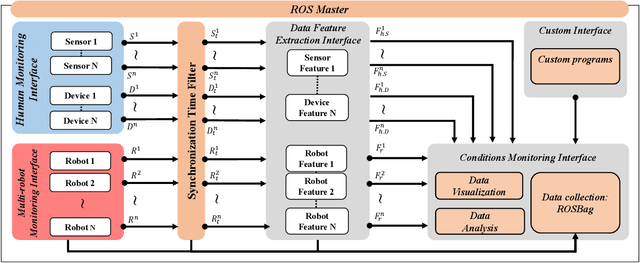
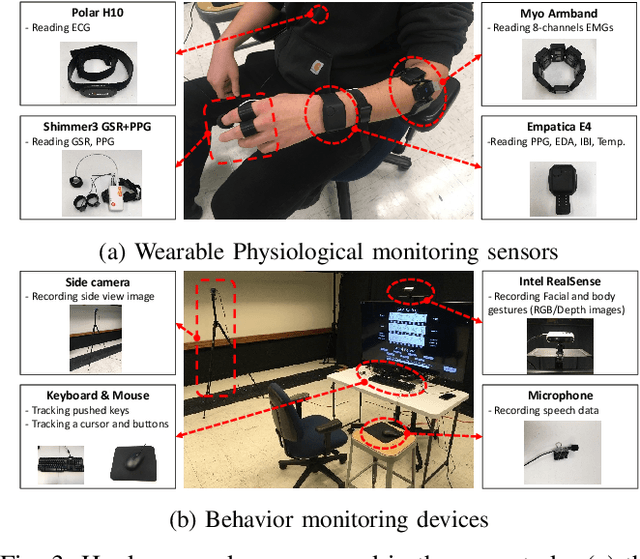
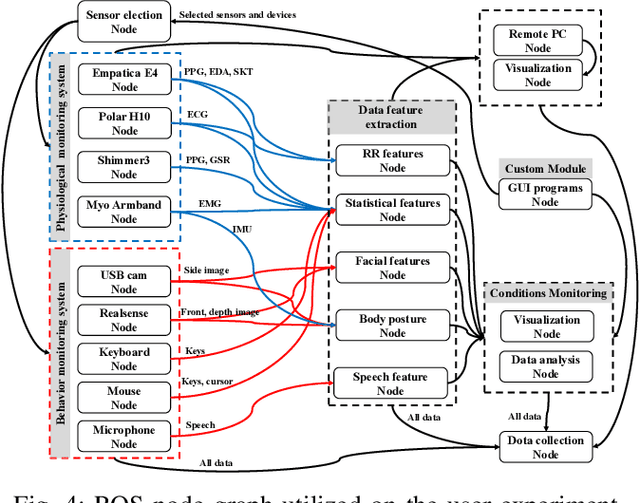
This paper presents a framework for monitoring human and robot conditions in human multi-robot interactions. The proposed framework consists of four modules: 1) human and robot conditions monitoring interface, 2) synchronization time filter, 3) data feature extraction interface, and 4) condition monitoring interface. The framework is based on Robot Operating System (ROS), and it supports physiological and behavioral sensors and devices and robot systems, as well as custom programs. Furthermore, it allows synchronizing the monitoring conditions and sharing them simultaneously. In order to validate the proposed framework, we present experiment results and analysis obtained from the user study where 30 human subjects participated and simulated robot experiments.