 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA ROS-based Framework for Monitoring Human and Robot Conditions in a Human-Multi-robot Team
Paper and Code
Jun 06, 2020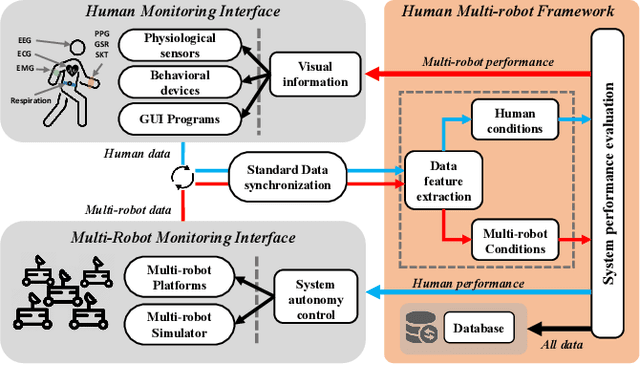
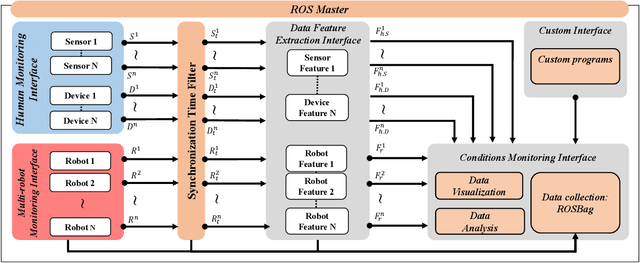
This paper presents a framework for monitoring human and robot conditions in human multi-robot interactions. The proposed framework consists of four modules: 1) human and robot conditions monitoring interface, 2) synchronization time filter, 3) data feature extraction interface, and 4) condition monitoring interface. The framework is based on Robot Operating System (ROS), and it supports physiological and behavioral sensors and devices and robot systems, as well as custom programs. Furthermore, it allows synchronizing the monitoring conditions and sharing them simultaneously. In order to validate the proposed framework, we present experiment results and analysis obtained from the user study where 30 human subjects participated and simulated robot experiments.