 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to design a dataset compliant with an ML-based system ODD?
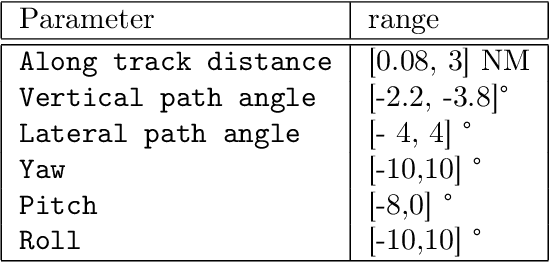
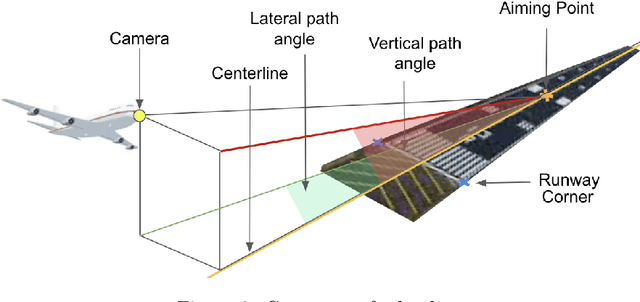
Jun 20, 2024This paper focuses on a Vision-based Landing task and presents the design and the validation of a dataset that would comply with the Operational Design Domain (ODD) of a Machine-Learning (ML) system. Relying on emerging certification standards, we describe the process for establishing ODDs at both the system and image levels. In the process, we present the translation of high-level system constraints into actionable image-level properties, allowing for the definition of verifiable Data Quality Requirements (DQRs). To illustrate this approach, we use the Landing Approach Runway Detection (LARD) dataset which combines synthetic imagery and real footage, and we focus on the steps required to verify the DQRs. The replicable framework presented in this paper addresses the challenges of designing a dataset compliant with the stringent needs of ML-based systems certification in safety-critical applications.
Formal description of ML models for unambiguous implementation
Jul 24, 2023



Implementing deep neural networks in safety critical systems, in particular in the aeronautical domain, will require to offer adequate specification paradigms to preserve the semantics of the trained model on the final hardware platform. We propose to extend the nnef language in order to allow traceable distribution and parallelisation optimizations of a trained model. We show how such a specification can be implemented in cuda on a Xavier platform.
LARD -- Landing Approach Runway Detection -- Dataset for Vision Based Landing
Apr 21, 2023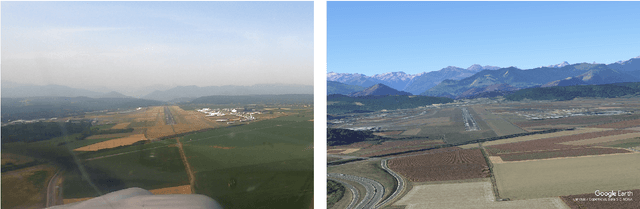
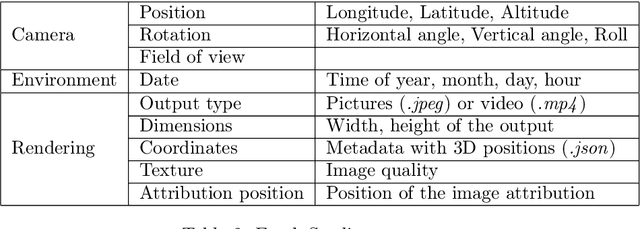
As the interest in autonomous systems continues to grow, one of the major challenges is collecting sufficient and representative real-world data. Despite the strong practical and commercial interest in autonomous landing systems in the aerospace field, there is a lack of open-source datasets of aerial images. To address this issue, we present a dataset-lard-of high-quality aerial images for the task of runway detection during approach and landing phases. Most of the dataset is composed of synthetic images but we also provide manually labelled images from real landing footages, to extend the detection task to a more realistic setting. In addition, we offer the generator which can produce such synthetic front-view images and enables automatic annotation of the runway corners through geometric transformations. This dataset paves the way for further research such as the analysis of dataset quality or the development of models to cope with the detection tasks. Find data, code and more up-to-date information at https://github.com/deel-ai/LARD
White Paper Machine Learning in Certified Systems
Mar 18, 2021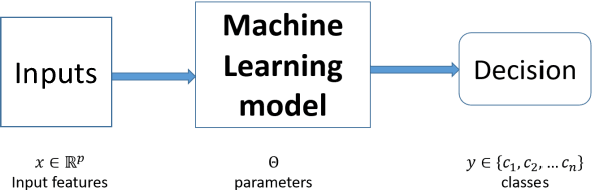
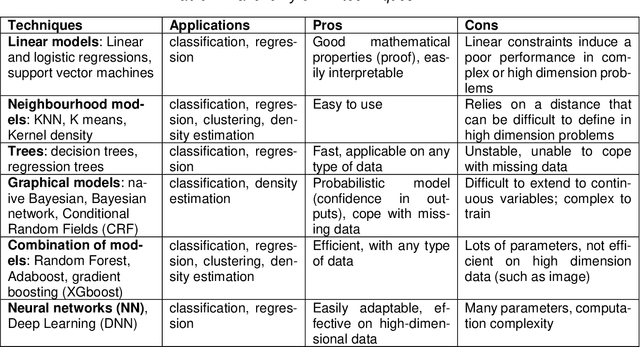

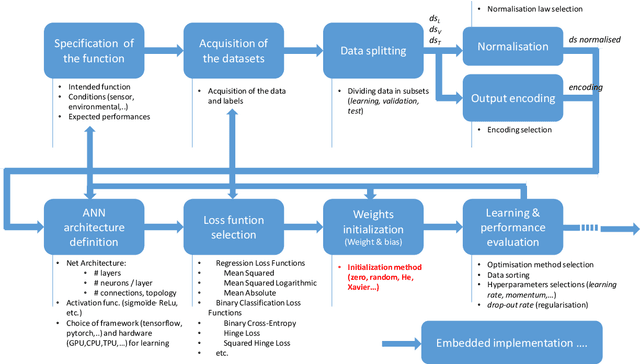
Machine Learning (ML) seems to be one of the most promising solution to automate partially or completely some of the complex tasks currently realized by humans, such as driving vehicles, recognizing voice, etc. It is also an opportunity to implement and embed new capabilities out of the reach of classical implementation techniques. However, ML techniques introduce new potential risks. Therefore, they have only been applied in systems where their benefits are considered worth the increase of risk. In practice, ML techniques raise multiple challenges that could prevent their use in systems submitted to certification constraints. But what are the actual challenges? Can they be overcome by selecting appropriate ML techniques, or by adopting new engineering or certification practices? These are some of the questions addressed by the ML Certification 3 Workgroup (WG) set-up by the Institut de Recherche Technologique Saint Exup\'ery de Toulouse (IRT), as part of the DEEL Project.
Overestimation learning with guarantees
Jan 26, 2021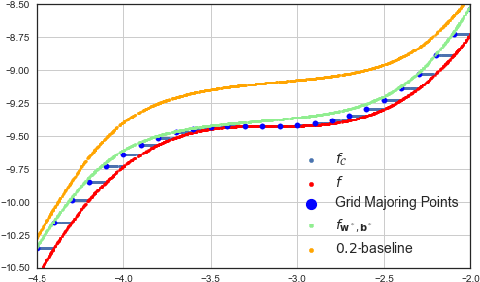
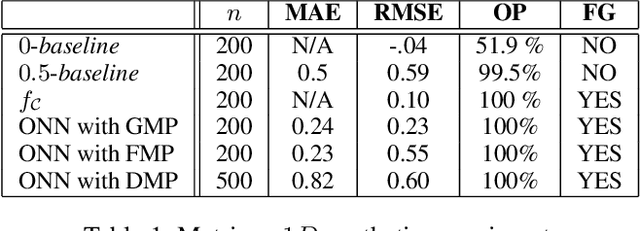
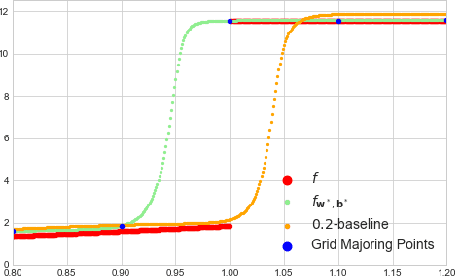
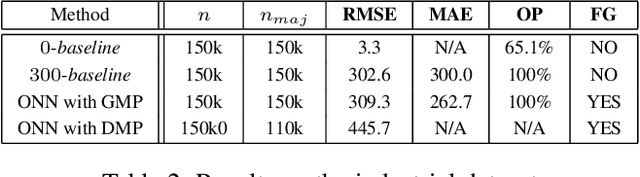
We describe a complete method that learns a neural network which is guaranteed to overestimate a reference function on a given domain. The neural network can then be used as a surrogate for the reference function. The method involves two steps. In the first step, we construct an adaptive set of Majoring Points. In the second step, we optimize a well-chosen neural network to overestimate the Majoring Points. In order to extend the guarantee on the Majoring Points to the whole domain, we necessarily have to make an assumption on the reference function. In this study, we assume that the reference function is monotonic. We provide experiments on synthetic and real problems. The experiments show that the density of the Majoring Points concentrate where the reference function varies. The learned over-estimations are both guaranteed to overestimate the reference function and are proven empirically to provide good approximations of it. Experiments on real data show that the method makes it possible to use the surrogate function in embedded systems for which an underestimation is critical; when computing the reference function requires too many resources.