 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNIGHT -- Non-Line-of-Sight Imaging from Indirect Time of Flight Data
Mar 28, 2024



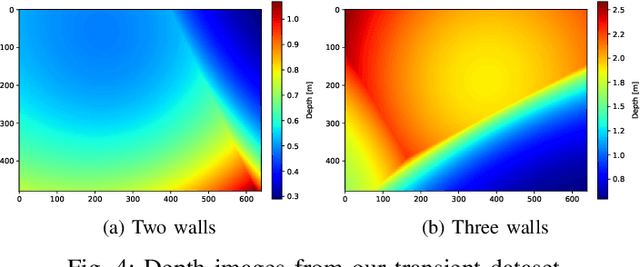
The acquisition of objects outside the Line-of-Sight of cameras is a very intriguing but also extremely challenging research topic. Recent works showed the feasibility of this idea exploiting transient imaging data produced by custom direct Time of Flight sensors. In this paper, for the first time, we tackle this problem using only data from an off-the-shelf indirect Time of Flight sensor without any further hardware requirement. We introduced a Deep Learning model able to re-frame the surfaces where light bounces happen as a virtual mirror. This modeling makes the task easier to handle and also facilitates the construction of annotated training data. From the obtained data it is possible to retrieve the depth information of the hidden scene. We also provide a first-in-its-kind synthetic dataset for the task and demonstrate the feasibility of the proposed idea over it.
A Low Memory Footprint Quantized Neural Network for Depth Completion of Very Sparse Time-of-Flight Depth Maps
May 25, 2022
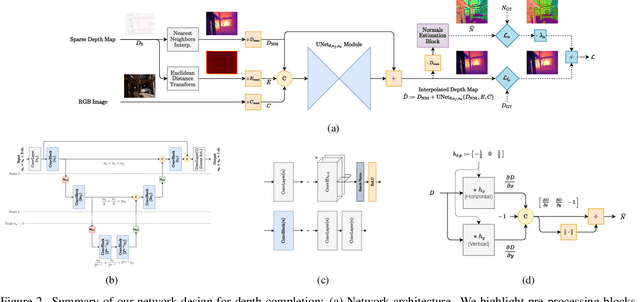
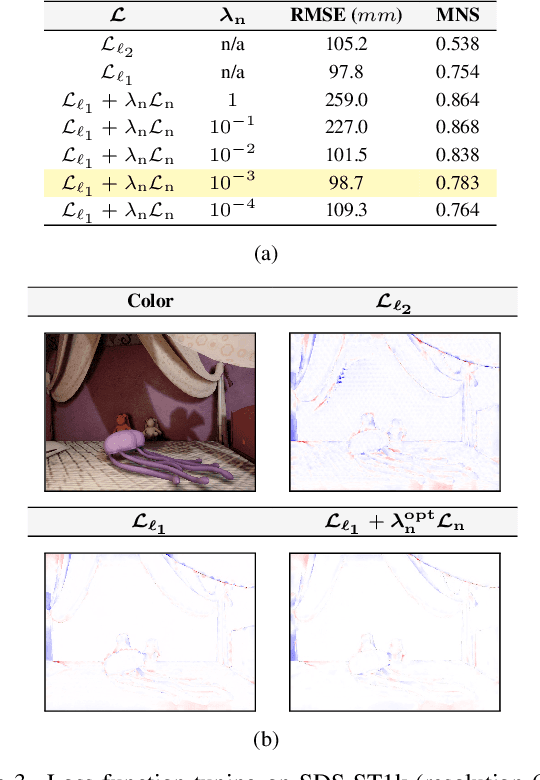
Sparse active illumination enables precise time-of-flight depth sensing as it maximizes signal-to-noise ratio for low power budgets. However, depth completion is required to produce dense depth maps for 3D perception. We address this task with realistic illumination and sensor resolution constraints by simulating ToF datasets for indoor 3D perception with challenging sparsity levels. We propose a quantized convolutional encoder-decoder network for this task. Our model achieves optimal depth map quality by means of input pre-processing and carefully tuned training with a geometry-preserving loss function. We also achieve low memory footprint for weights and activations by means of mixed precision quantization-at-training techniques. The resulting quantized models are comparable to the state of the art in terms of quality, but they require very low GPU times and achieve up to 14-fold memory size reduction for the weights w.r.t. their floating point counterpart with minimal impact on quality metrics.
Lightweight Deep Learning Architecture for MPI Correction and Transient Reconstruction
Nov 29, 2021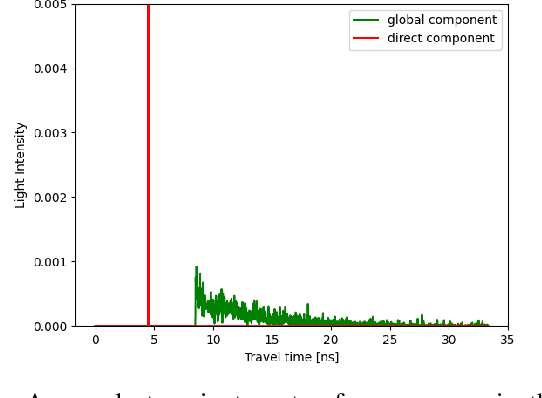
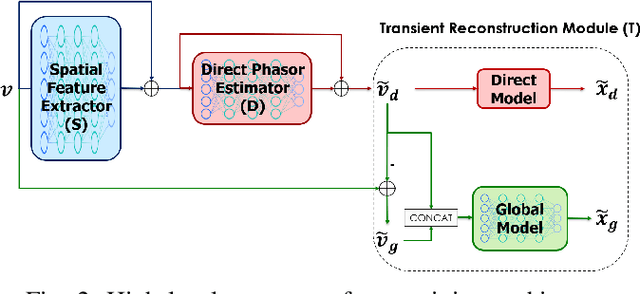
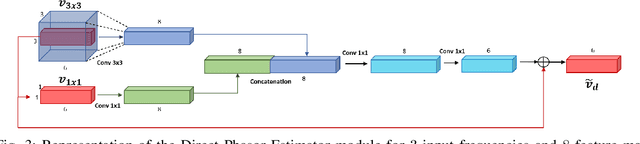
Indirect Time-of-Flight cameras (iToF) are low-cost devices that provide depth images at an interactive frame rate. However, they are affected by different error sources, with the spotlight taken by Multi-Path Interference (MPI), a key challenge for this technology. Common data-driven approaches tend to focus on a direct estimation of the output depth values, ignoring the underlying transient propagation of the light in the scene. In this work instead, we propose a very compact architecture, leveraging on the direct-global subdivision of transient information for the removal of MPI and for the reconstruction of the transient information itself. The proposed model reaches state-of-the-art MPI correction performances both on synthetic and real data and proves to be very competitive also at extreme levels of noise; at the same time, it also makes a step towards reconstructing transient information from multi-frequency iToF data.