 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Deep Learning Architecture for MPI Correction and Transient Reconstruction
Nov 29, 2021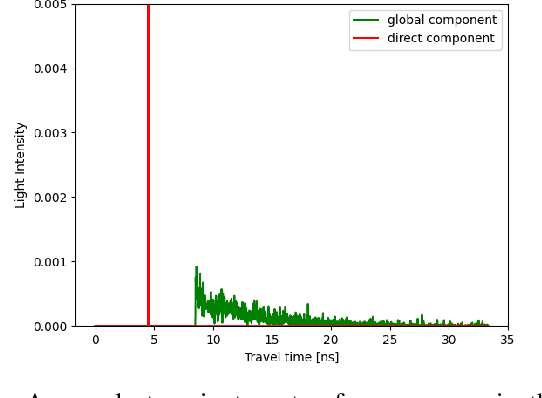
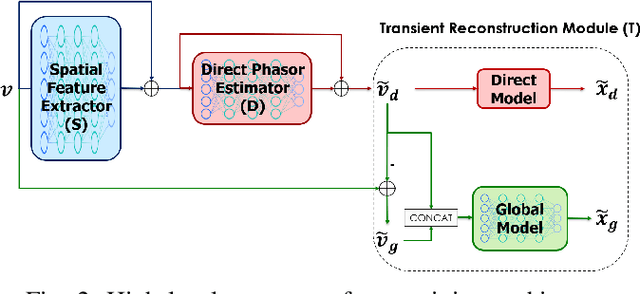
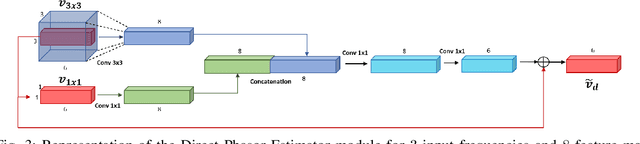
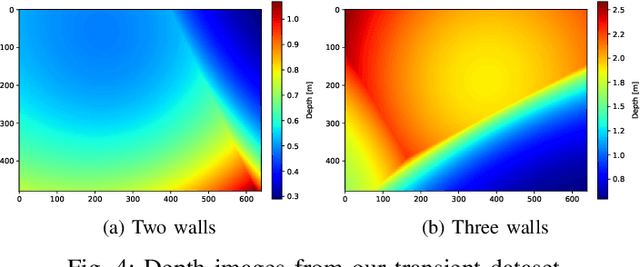
Indirect Time-of-Flight cameras (iToF) are low-cost devices that provide depth images at an interactive frame rate. However, they are affected by different error sources, with the spotlight taken by Multi-Path Interference (MPI), a key challenge for this technology. Common data-driven approaches tend to focus on a direct estimation of the output depth values, ignoring the underlying transient propagation of the light in the scene. In this work instead, we propose a very compact architecture, leveraging on the direct-global subdivision of transient information for the removal of MPI and for the reconstruction of the transient information itself. The proposed model reaches state-of-the-art MPI correction performances both on synthetic and real data and proves to be very competitive also at extreme levels of noise; at the same time, it also makes a step towards reconstructing transient information from multi-frequency iToF data.
A new operation mode for depth-focused high-sensitivity ToF range finding
Sep 06, 2019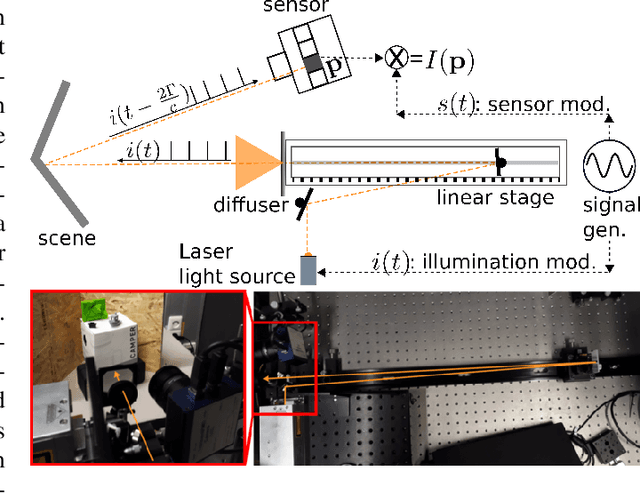
We introduce pulsed correlation time-of-flight (PC-ToF) sensing, a new operation mode for correlation time-of-flight range sensors that combines a sub-nanosecond laser pulse source with a rectangular demodulation at the sensor side. In contrast to previous work, our proposed measurement scheme attempts not to optimize depth accuracy over the full measurement: With PC-ToF we trade the global sensitivity of a standard C-ToF setup for measurements with strongly localized high sensitivity -- we greatly enhance the depth resolution for the acquisition of scene features around a desired depth of interest. Using real-world experiments, we show that our technique is capable of achieving depth resolutions down to 2mm using a modulation frequency as low as 10MHz and an optical power as low as 1mW. This makes PC-ToF especially viable for low-power applications.