 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards practical object detection for weed spraying in precision agriculture
Sep 22, 2021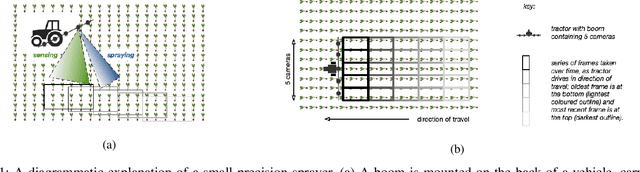

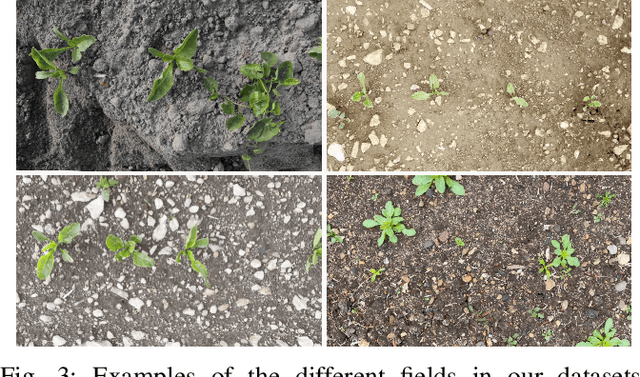
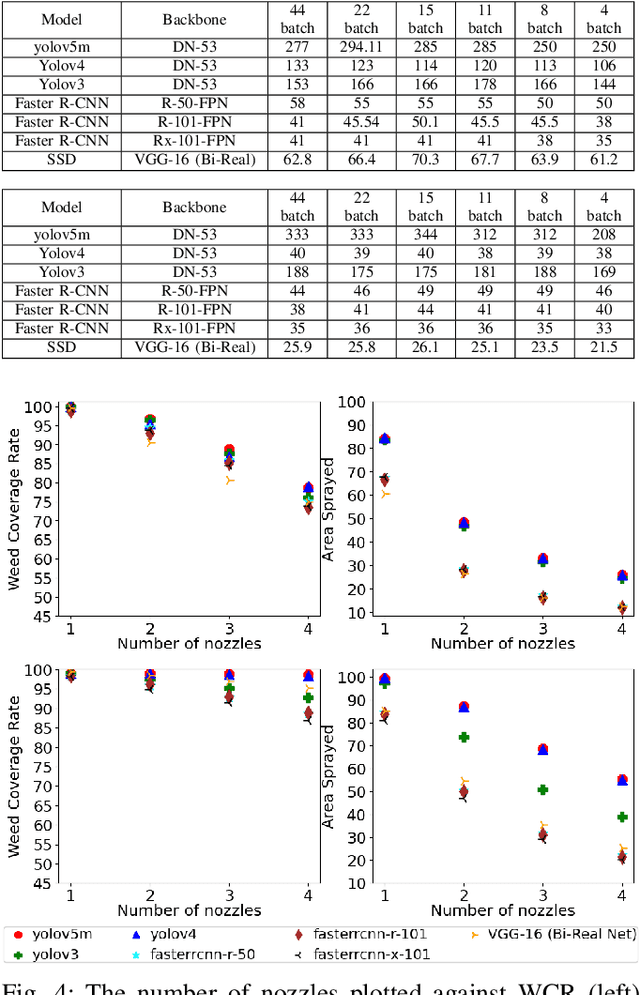
The evolution of smaller, faster processors and cheaper digital storage mechanisms across the last 4-5 decades has vastly increased the opportunity to integrate intelligent technologies in a wide range of practical environments to address a broad spectrum of tasks. One exciting application domain for such technologies is precision agriculture, where the ability to integrate on-board machine vision with data-driven actuation means that farmers can make decisions about crop care and harvesting at the level of the individual plant rather than the whole field. This makes sense both economically and environmentally. However, the key driver for this capability is fast and robust machine vision -- typically driven by machine learning (ML) solutions and dependent on accurate modelling. One critical challenge is that the bulk of ML-based vision research considers only metrics that evaluate the accuracy of object detection and do not assess practical factors. This paper introduces three metrics that highlight different aspects relevant for real-world deployment of precision weeding and demonstrates their utility through experimental results.
Self-supervised Representation Learning for Reliable Robotic Monitoring of Fruit Anomalies
Sep 21, 2021



Data augmentation can be a simple yet powerful tool for autonomous robots to fully utilise available data for self-supervised identification of atypical scenes or objects. State-of-the-art augmentation methods arbitrarily embed structural peculiarity in focal objects on typical images so that classifying these artefacts can provide guidance for learning representations for the detection of anomalous visual inputs. In this paper, however, we argue that learning such structure-sensitive representations can be a suboptimal approach to some classes of anomaly (e.g., unhealthy fruits) which are better recognised by a different type of visual element such as "colour". We thus propose Channel Randomisation as a novel data augmentation method for restricting neural network models to learn encoding of "colour irregularity" whilst predicting channel-randomised images to ultimately build reliable fruit-monitoring robots identifying atypical fruit qualities. Our experiments show that (1) the colour-based alternative can better learn representations for consistently accurate identification of fruit anomalies in various fruit species, and (2) validation accuracy can be monitored for early stopping of training due to positive correlation between the colour-learning task and fruit anomaly detection. Moreover, the proposed approach is evaluated on a new anomaly dataset Riseholme-2021, consisting of 3:5K strawberry images collected from a mobile robot, which we share with the community to encourage active agri-robotics research.