 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Discrete Abstractions for Visual Rearrangement Tasks Using Vision-Guided Graph Coloring
Sep 17, 2025Learning abstractions directly from data is a core challenge in robotics. Humans naturally operate at an abstract level, reasoning over high-level subgoals while delegating execution to low-level motor skills -- an ability that enables efficient problem solving in complex environments. In robotics, abstractions and hierarchical reasoning have long been central to planning, yet they are typically hand-engineered, demanding significant human effort and limiting scalability. Automating the discovery of useful abstractions directly from visual data would make planning frameworks more scalable and more applicable to real-world robotic domains. In this work, we focus on rearrangement tasks where the state is represented with raw images, and propose a method to induce discrete, graph-structured abstractions by combining structural constraints with an attention-guided visual distance. Our approach leverages the inherent bipartite structure of rearrangement problems, integrating structural constraints and visual embeddings into a unified framework. This enables the autonomous discovery of abstractions from vision alone, which can subsequently support high-level planning. We evaluate our method on two rearrangement tasks in simulation and show that it consistently identifies meaningful abstractions that facilitate effective planning and outperform existing approaches.
Multi-layer Motion Planning with Kinodynamic and Spatio-Temporal Constraints
Mar 10, 2025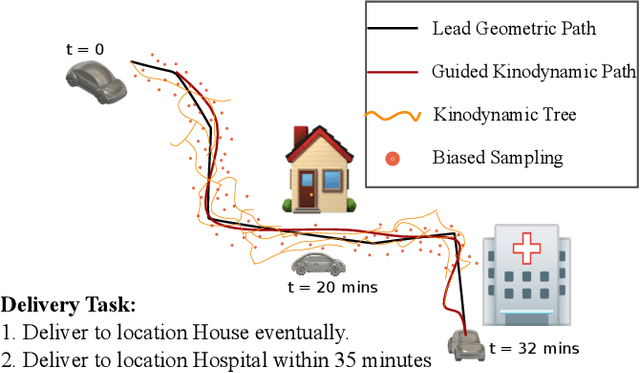
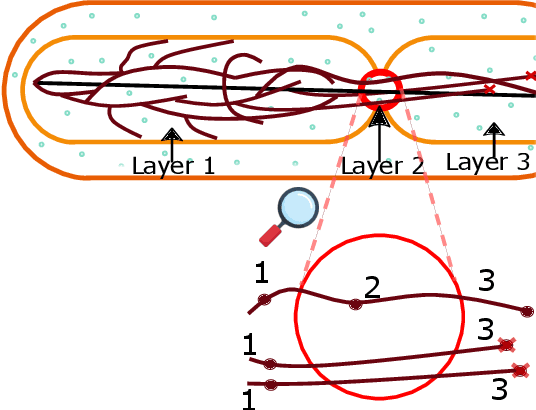
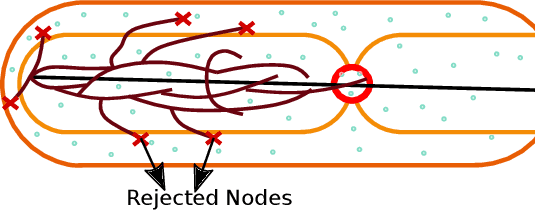
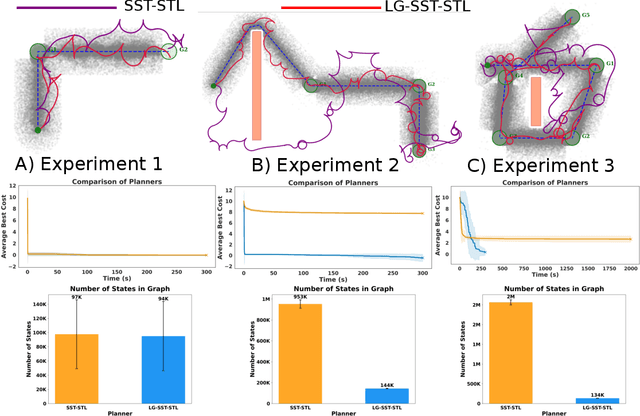
We propose a novel, multi-layered planning approach for computing paths that satisfy both kinodynamic and spatiotemporal constraints. Our three-part framework first establishes potential sequences to meet spatial constraints, using them to calculate a geometric lead path. This path then guides an asymptotically optimal sampling-based kinodynamic planner, which minimizes an STL-robustness cost to jointly satisfy spatiotemporal and kinodynamic constraints. In our experiments, we test our method with a velocity-controlled Ackerman-car model and demonstrate significant efficiency gains compared to prior art. Additionally, our method is able to generate complex path maneuvers, such as crossovers, something that previous methods had not demonstrated.
Robotic Defect Inspection with Visual and Tactile Perception for Large-scale Components
Sep 08, 2023



In manufacturing processes, surface inspection is a key requirement for quality assessment and damage localization. Due to this, automated surface anomaly detection has become a promising area of research in various industrial inspection systems. A particular challenge in industries with large-scale components, like aircraft and heavy machinery, is inspecting large parts with very small defect dimensions. Moreover, these parts can be of curved shapes. To address this challenge, we present a 2-stage multi-modal inspection pipeline with visual and tactile sensing. Our approach combines the best of both visual and tactile sensing by identifying and localizing defects using a global view (vision) and using the localized area for tactile scanning for identifying remaining defects. To benchmark our approach, we propose a novel real-world dataset with multiple metallic defect types per image, collected in the production environments on real aerospace manufacturing parts, as well as online robot experiments in two environments. Our approach is able to identify 85% defects using Stage I and identify 100% defects after Stage II. The dataset is publicly available at https://zenodo.org/record/8327713