 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMLLM-Search: A Zero-Shot Approach to Finding People using Multimodal Large Language Models
Nov 27, 2024



Robotic search of people in human-centered environments, including healthcare settings, is challenging as autonomous robots need to locate people without complete or any prior knowledge of their schedules, plans or locations. Furthermore, robots need to be able to adapt to real-time events that can influence a person's plan in an environment. In this paper, we present MLLM-Search, a novel zero-shot person search architecture that leverages multimodal large language models (MLLM) to address the mobile robot problem of searching for a person under event-driven scenarios with varying user schedules. Our approach introduces a novel visual prompting method to provide robots with spatial understanding of the environment by generating a spatially grounded waypoint map, representing navigable waypoints by a topological graph and regions by semantic labels. This is incorporated into a MLLM with a region planner that selects the next search region based on the semantic relevance to the search scenario, and a waypoint planner which generates a search path by considering the semantically relevant objects and the local spatial context through our unique spatial chain-of-thought prompting approach. Extensive 3D photorealistic experiments were conducted to validate the performance of MLLM-Search in searching for a person with a changing schedule in different environments. An ablation study was also conducted to validate the main design choices of MLLM-Search. Furthermore, a comparison study with state-of-the art search methods demonstrated that MLLM-Search outperforms existing methods with respect to search efficiency. Real-world experiments with a mobile robot in a multi-room floor of a building showed that MLLM-Search was able to generalize to finding a person in a new unseen environment.
Find Everything: A General Vision Language Model Approach to Multi-Object Search
Oct 01, 2024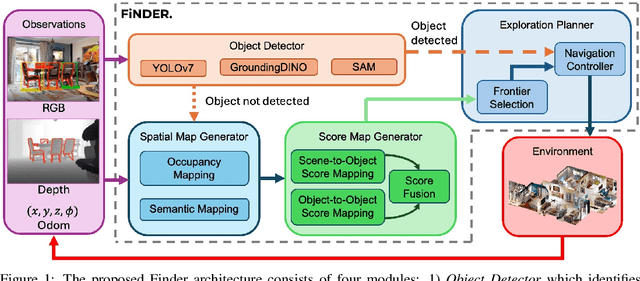
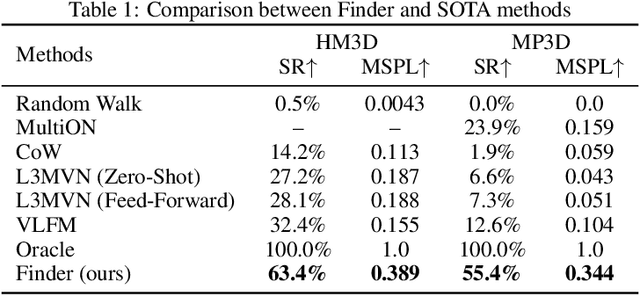
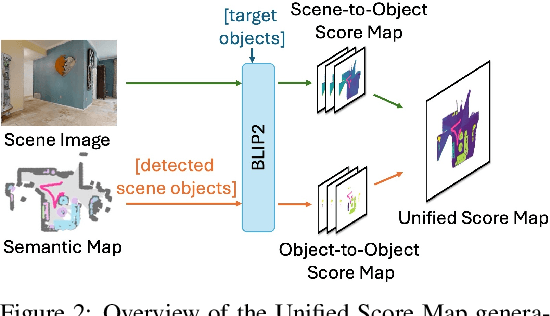
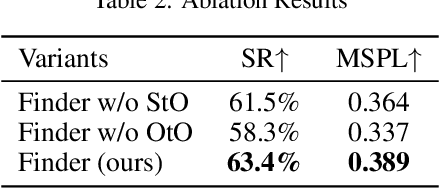
The Multi-Object Search (MOS) problem involves navigating to a sequence of locations to maximize the likelihood of finding target objects while minimizing travel costs. In this paper, we introduce a novel approach to the MOS problem, called Finder, which leverages vision language models (VLMs) to locate multiple objects across diverse environments. Specifically, our approach introduces multi-channel score maps to track and reason about multiple objects simultaneously during navigation, along with a score fusion technique that combines scene-level and object-level semantic correlations. Experiments in both simulated and real-world settings showed that Finder outperforms existing methods using deep reinforcement learning and VLMs. Ablation and scalability studies further validated our design choices and robustness with increasing numbers of target objects, respectively. Website: https://find-all-my-things.github.io/
4CNet: A Confidence-Aware, Contrastive, Conditional, Consistency Model for Robot Map Prediction in Multi-Robot Environments
Feb 27, 2024



Mobile robots in unknown cluttered environments with irregularly shaped obstacles often face sensing, energy, and communication challenges which directly affect their ability to explore these environments. In this paper, we introduce a novel deep learning method, Confidence-Aware Contrastive Conditional Consistency Model (4CNet), for mobile robot map prediction during resource-limited exploration in multi-robot environments. 4CNet uniquely incorporates: 1) a conditional consistency model for map prediction in irregularly shaped unknown regions, 2) a contrastive map-trajectory pretraining framework for a trajectory encoder that extracts spatial information from the trajectories of nearby robots during map prediction, and 3) a confidence network to measure the uncertainty of map prediction for effective exploration under resource constraints. We incorporate 4CNet within our proposed robot exploration with map prediction architecture, 4CNet-E. We then conduct extensive comparison studies with 4CNet-E and state-of-the-art heuristic and learning methods to investigate both map prediction and exploration performance in environments consisting of uneven terrain and irregularly shaped obstacles. Results showed that 4CNet-E obtained statistically significant higher prediction accuracy and area coverage with varying environment sizes, number of robots, energy budgets, and communication limitations. Real-world mobile robot experiments were performed and validated the feasibility and generalizability of 4CNet-E for mobile robot map prediction and exploration.
NavFormer: A Transformer Architecture for Robot Target-Driven Navigation in Unknown and Dynamic Environments
Feb 09, 2024



In unknown cluttered and dynamic environments such as disaster scenes, mobile robots need to perform target-driven navigation in order to find people or objects of interest, while being solely guided by images of the targets. In this paper, we introduce NavFormer, a novel end-to-end transformer architecture developed for robot target-driven navigation in unknown and dynamic environments. NavFormer leverages the strengths of both 1) transformers for sequential data processing and 2) self-supervised learning (SSL) for visual representation to reason about spatial layouts and to perform collision-avoidance in dynamic settings. The architecture uniquely combines dual-visual encoders consisting of a static encoder for extracting invariant environment features for spatial reasoning, and a general encoder for dynamic obstacle avoidance. The primary robot navigation task is decomposed into two sub-tasks for training: single robot exploration and multi-robot collision avoidance. We perform cross-task training to enable the transfer of learned skills to the complex primary navigation task without the need for task-specific fine-tuning. Simulated experiments demonstrate that NavFormer can effectively navigate a mobile robot in diverse unknown environments, outperforming existing state-of-the-art methods in terms of success rate and success weighted by (normalized inverse) path length. Furthermore, a comprehensive ablation study is performed to evaluate the impact of the main design choices of the structure and training of NavFormer, further validating their effectiveness in the overall system.
Deep Reinforcement Learning for Decentralized Multi-Robot Exploration with Macro Actions
Oct 05, 2021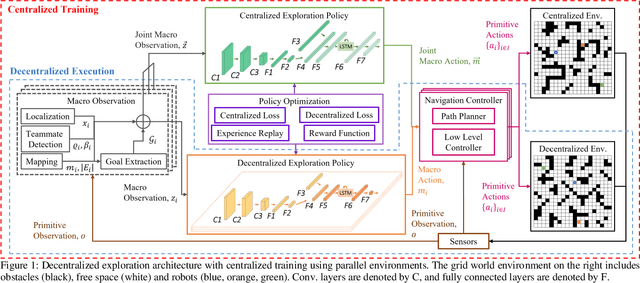
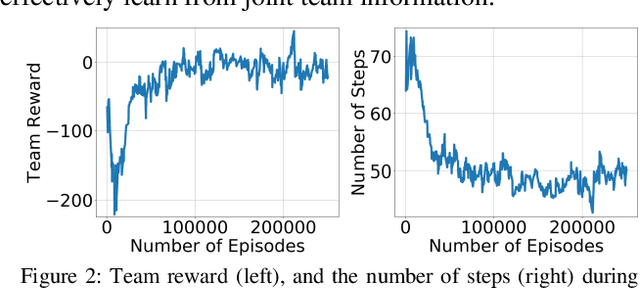
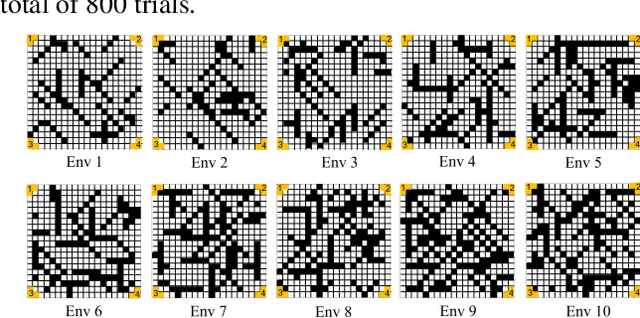
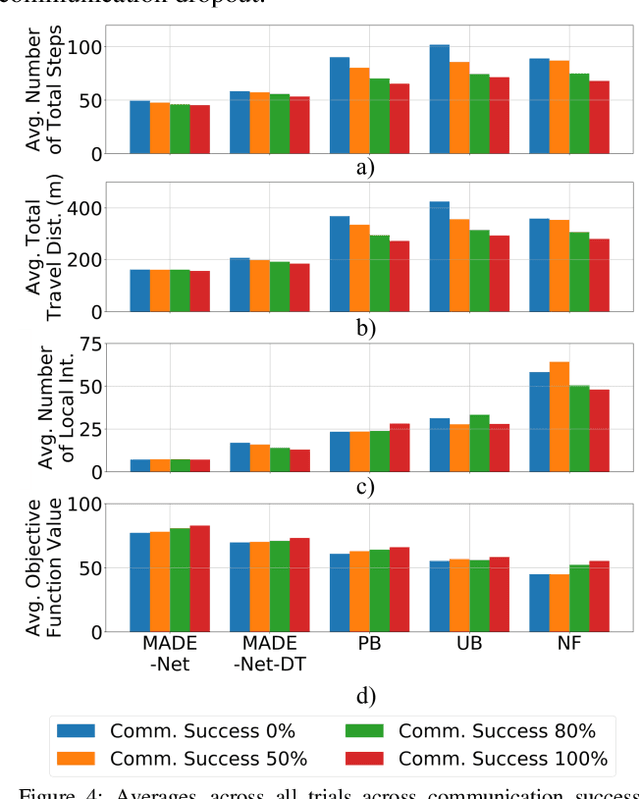
Cooperative multi-robot teams need to be able to explore cluttered and unstructured environments together while dealing with communication challenges. Specifically, during communication dropout, local information about robots can no longer be exchanged to maintain robot team coordination. Therefore, robots need to consider high-level teammate intentions during action selection. In this paper, we present the first Macro Action Decentralized Exploration Network (MADE-Net) using multi-agent deep reinforcement learning to address the challenges of communication dropouts during multi-robot exploration in unseen, unstructured, and cluttered environments. Simulated robot team exploration experiments were conducted and compared to classical and deep reinforcement learning methods. The results showed that our MADE-Net method was able to outperform all benchmark methods in terms of computation time, total travel distance, number of local interactions between robots, and exploration rate across various degrees of communication dropouts; highlighting the effectiveness and robustness of our method.