 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZeroScatter: Domain Transfer for Long Distance Imaging and Vision through Scattering Media
Paper and Code
Feb 11, 2021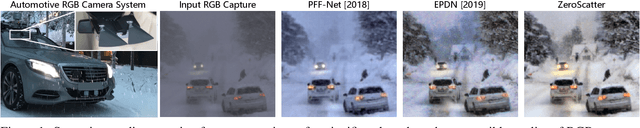


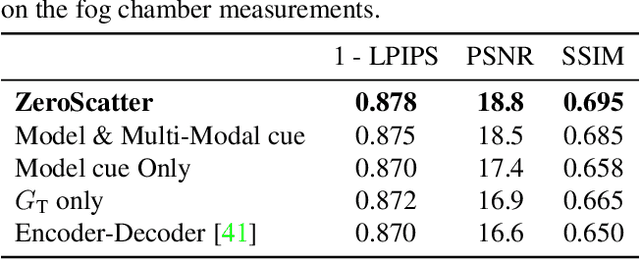
Adverse weather conditions, including snow, rain, and fog pose a challenge for both human and computer vision in outdoor scenarios. Handling these environmental conditions is essential for safe decision making, especially in autonomous vehicles, robotics, and drones. Most of today's supervised imaging and vision approaches, however, rely on training data collected in the real world that is biased towards good weather conditions, with dense fog, snow, and heavy rain as outliers in these datasets. Without training data, let alone paired data, existing autonomous vehicles often limit themselves to good conditions and stop when dense fog or snow is detected. In this work, we tackle the lack of supervised training data by combining synthetic and indirect supervision. We present ZeroScatter, a domain transfer method for converting RGB-only captures taken in adverse weather into clear daytime scenes. ZeroScatter exploits model-based, temporal, multi-view, multi-modal, and adversarial cues in a joint fashion, allowing us to train on unpaired, biased data. We assess the proposed method using real-world captures, and the proposed method outperforms existing monocular de-scattering approaches by 2.8 dB PSNR on controlled fog chamber measurements.