 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhy are Saliency Maps Noisy? Cause of and Solution to Noisy Saliency Maps
Paper and Code
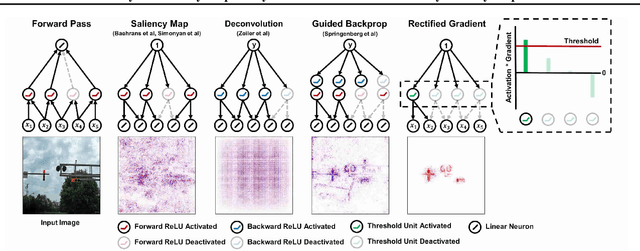

Saliency Map, the gradient of the score function with respect to the input, is the most basic technique for interpreting deep neural network decisions. However, saliency maps are often visually noisy. Although several hypotheses were proposed to account for this phenomenon, there are few works that provide rigorous analyses of noisy saliency maps. In this paper, we identify that noise occurs in saliency maps when irrelevant features pass through ReLU activation functions. Then we propose Rectified Gradient, a method that solves this problem through layer-wise thresholding during backpropagation. Experiments with neural networks trained on CIFAR-10 and ImageNet showed effectiveness of our method and its superiority to other attribution methods.