 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat You See is What You Grasp: User-Friendly Grasping Guided by Near-eye-tracking
Paper and Code
Sep 13, 2022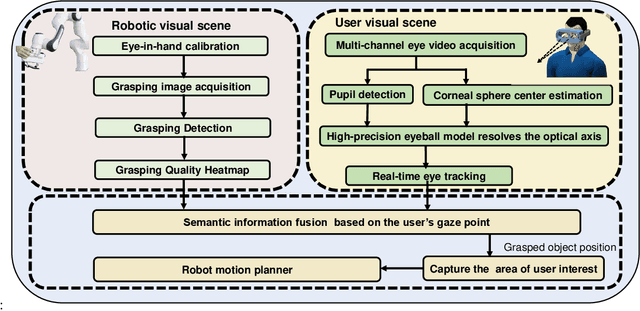
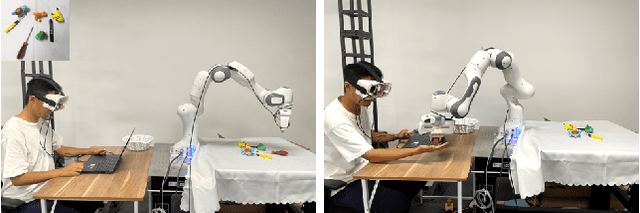
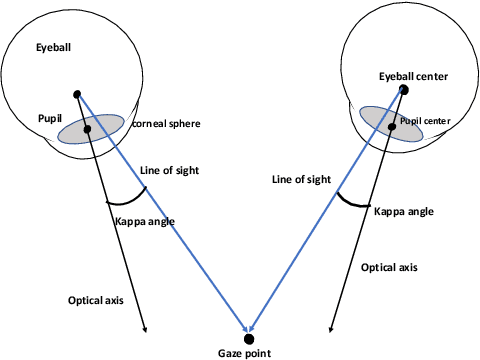
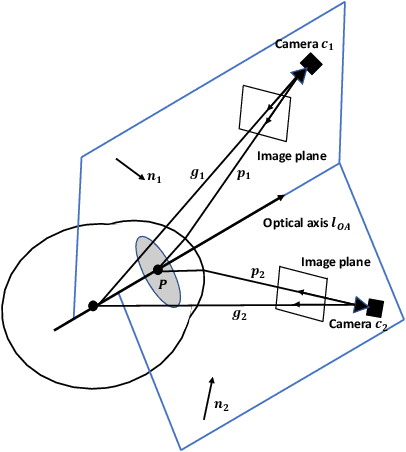
This work presents a next-generation human-robot interface that can infer and realize the user's manipulation intention via sight only. Specifically, we develop a system that integrates near-eye-tracking and robotic manipulation to enable user-specified actions (e.g., grasp, pick-and-place, etc), where visual information is merged with human attention to create a mapping for desired robot actions. To enable sight guided manipulation, a head-mounted near-eye-tracking device is developed to track the eyeball movements in real-time, so that the user's visual attention can be identified. To improve the grasping performance, a transformer based grasp model is then developed. Stacked transformer blocks are used to extract hierarchical features where the volumes of channels are expanded at each stage while squeezing the resolution of feature maps. Experimental validation demonstrates that the eye-tracking system yields low gaze estimation error and the grasping system yields promising results on multiple grasping datasets. This work is a proof of concept for gaze interaction-based assistive robot, which holds great promise to help the elder or upper limb disabilities in their daily lives. A demo video is available at \url{https://www.youtube.com/watch?v=yuZ1hukYUrM}.