 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Matters for 3D Scene Flow Network
Paper and Code
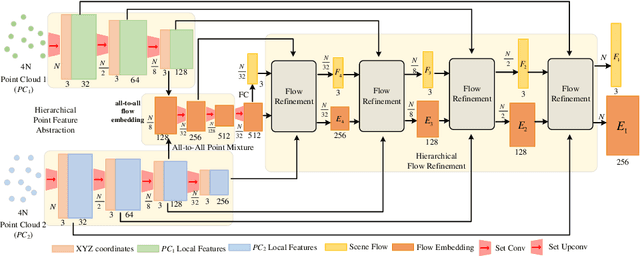
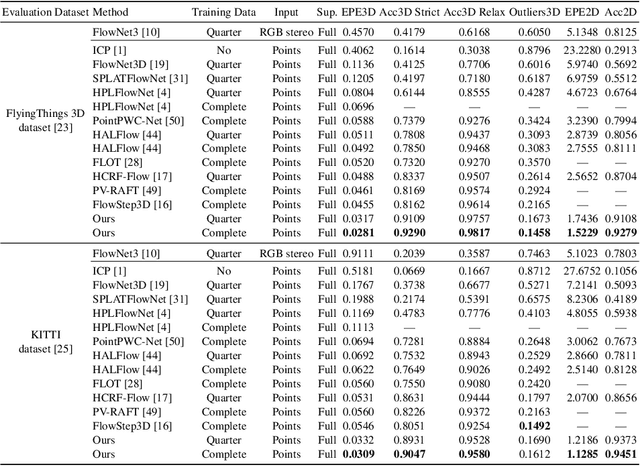


3D scene flow estimation from point clouds is a low-level 3D motion perception task in computer vision. Flow embedding is a commonly used technique in scene flow estimation, and it encodes the point motion between two consecutive frames. Thus, it is critical for the flow embeddings to capture the correct overall direction of the motion. However, previous works only search locally to determine a soft correspondence, ignoring the distant points that turn out to be the actual matching ones. In addition, the estimated correspondence is usually from the forward direction of the adjacent point clouds, and may not be consistent with the estimated correspondence acquired from the backward direction. To tackle these problems, we propose a novel all-to-all flow embedding layer with backward reliability validation during the initial scene flow estimation. Besides, we investigate and compare several design choices in key components of the 3D scene flow network, including the point similarity calculation, input elements of predictor, and predictor & refinement level design. After carefully choosing the most effective designs, we are able to present a model that achieves the state-of-the-art performance on FlyingThings3D and KITTI Scene Flow datasets. Our proposed model surpasses all existing methods by at least 38.2% on FlyingThings3D dataset and 24.7% on KITTI Scene Flow dataset for EPE3D metric. We release our codes at https://github.com/IRMVLab/3DFlow.