 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeighted Point Cloud Normal Estimation
Paper and Code
May 06, 2023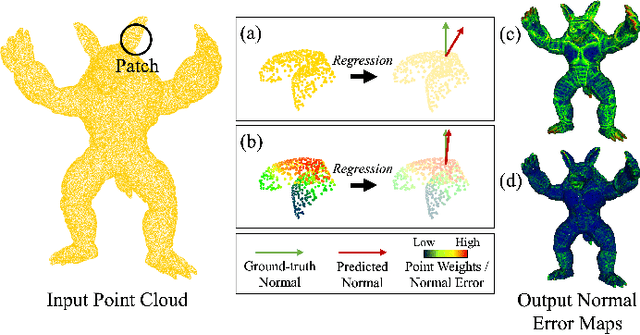
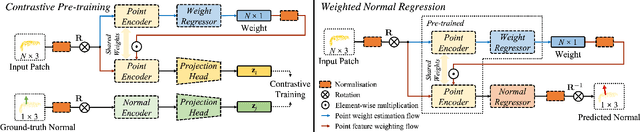
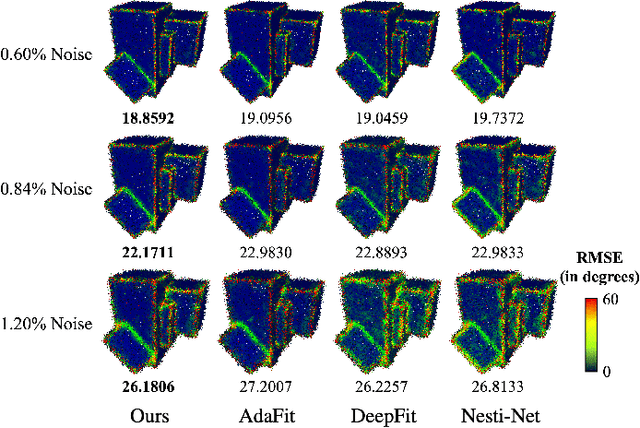
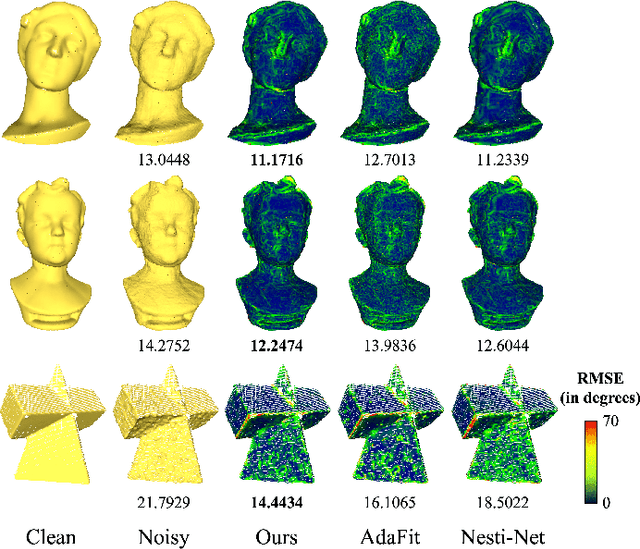
Existing normal estimation methods for point clouds are often less robust to severe noise and complex geometric structures. Also, they usually ignore the contributions of different neighbouring points during normal estimation, which leads to less accurate results. In this paper, we introduce a weighted normal estimation method for 3D point cloud data. We innovate in two key points: 1) we develop a novel weighted normal regression technique that predicts point-wise weights from local point patches and use them for robust, feature-preserving normal regression; 2) we propose to conduct contrastive learning between point patches and the corresponding ground-truth normals of the patches' central points as a pre-training process to facilitate normal regression. Comprehensive experiments demonstrate that our method can robustly handle noisy and complex point clouds, achieving state-of-the-art performance on both synthetic and real-world datasets.