 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeighted Motion Averaging for the Registration of Multi-View Range Scans
Paper and Code
Apr 09, 2017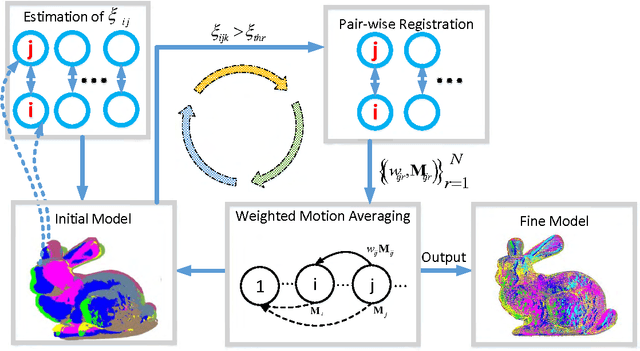

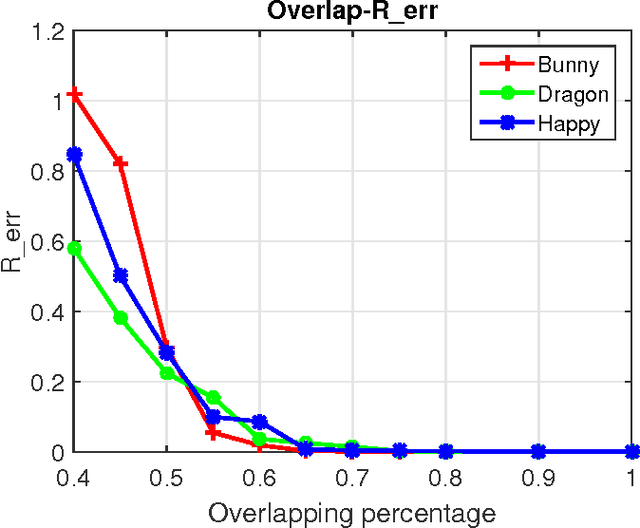
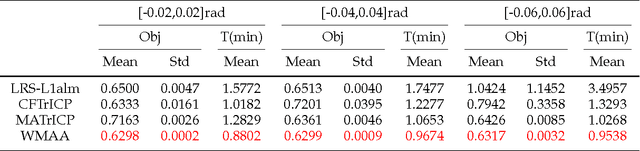
Multi-view registration is a fundamental but challenging problem in 3D reconstruction and robot vision. Although the original motion averaging algorithm has been introduced as an effective means to solve the multi-view registration problem, it does not consider the reliability and accuracy of each relative motion. Accordingly, this paper proposes a novel motion averaging algorithm for multi-view registration. Firstly, it utilizes the pair-wise registration algorithm to estimate the relative motion and overlapping percentage of each scan pair with a certain degree of overlap. With the overlapping percentage available, it views the overlapping percentage as the corresponding weight of each scan pair and proposes the weight motion averaging algorithm, which can pay more attention to reliable and accurate relative motions. By treating each relative motion distinctively, more accurate registration can be achieved by applying the weighted motion averaging to multi-view range scans. Experimental results demonstrate the superiority of our proposed approach compared with the state-of-the-art methods in terms of accuracy, robustness and efficiency.