 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWasteGAN: Data Augmentation for Robotic Waste Sorting through Generative Adversarial Networks
Paper and Code
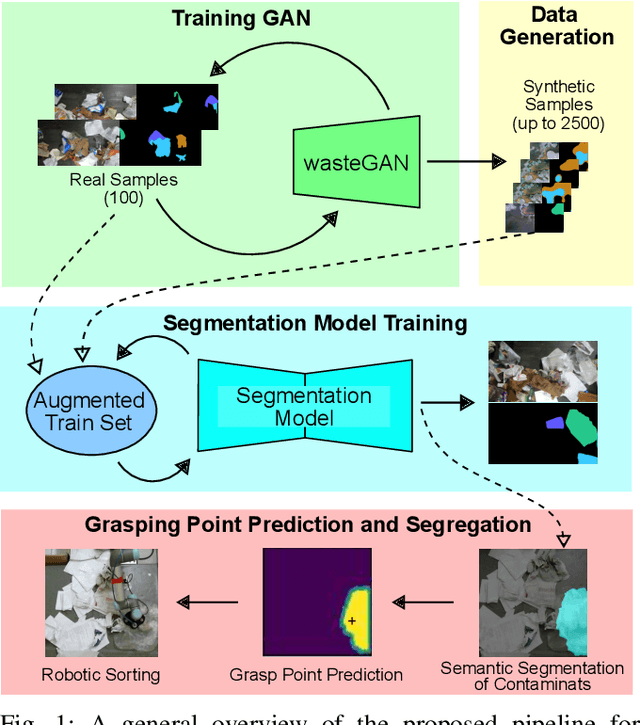
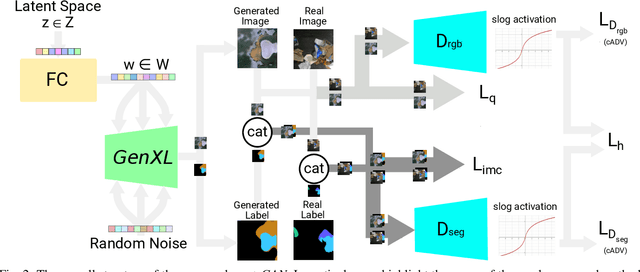
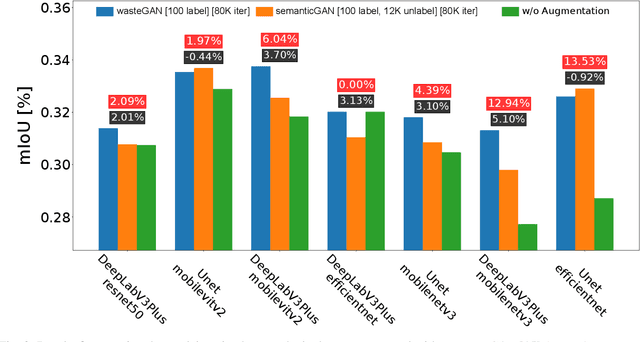
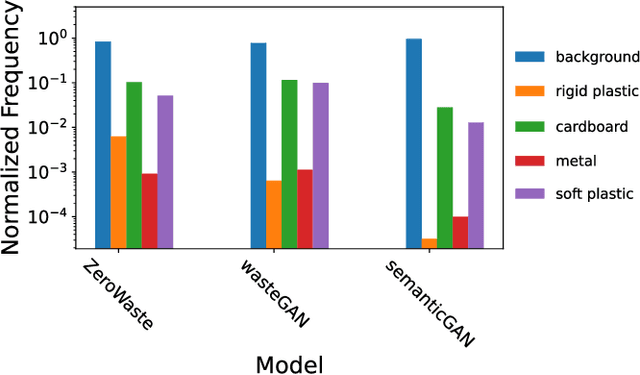
Robotic waste sorting poses significant challenges in both perception and manipulation, given the extreme variability of objects that should be recognized on a cluttered conveyor belt. While deep learning has proven effective in solving complex tasks, the necessity for extensive data collection and labeling limits its applicability in real-world scenarios like waste sorting. To tackle this issue, we introduce a data augmentation method based on a novel GAN architecture called wasteGAN. The proposed method allows to increase the performance of semantic segmentation models, starting from a very limited bunch of labeled examples, such as few as 100. The key innovations of wasteGAN include a novel loss function, a novel activation function, and a larger generator block. Overall, such innovations helps the network to learn from limited number of examples and synthesize data that better mirrors real-world distributions. We then leverage the higher-quality segmentation masks predicted from models trained on the wasteGAN synthetic data to compute semantic-aware grasp poses, enabling a robotic arm to effectively recognizing contaminants and separating waste in a real-world scenario. Through comprehensive evaluation encompassing dataset-based assessments and real-world experiments, our methodology demonstrated promising potential for robotic waste sorting, yielding performance gains of up to 5.8\% in picking contaminants. The project page is available at https://github.com/bach05/wasteGAN.git