Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Memory for Robust Path Following
Paper and Code
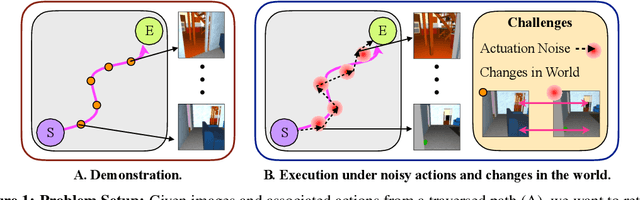
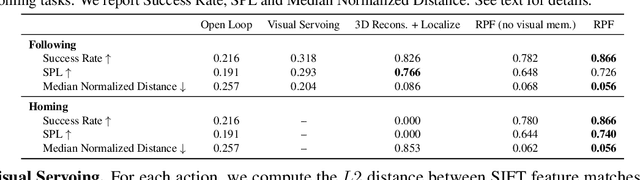
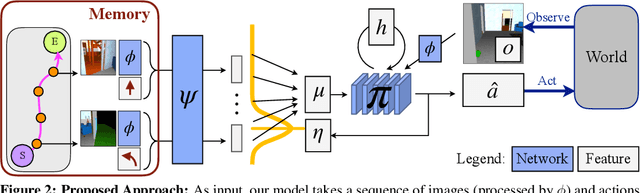
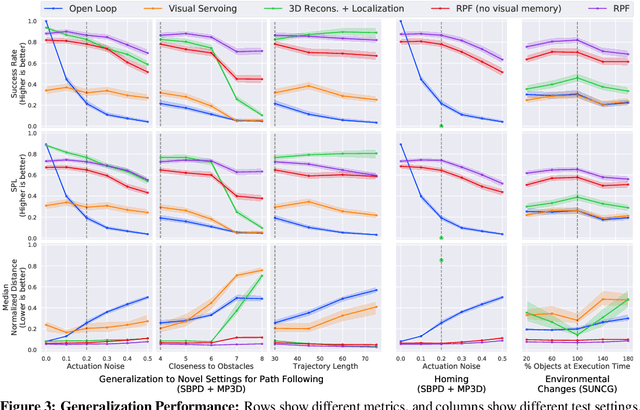
Humans routinely retrace paths in a novel environment both forwards and backwards despite uncertainty in their motion. This paper presents an approach for doing so. Given a demonstration of a path, a first network generates a path abstraction. Equipped with this abstraction, a second network observes the world and decides how to act to retrace the path under noisy actuation and a changing environment. The two networks are optimized end-to-end at training time. We evaluate the method in two realistic simulators, performing path following and homing under actuation noise and environmental changes. Our experiments show that our approach outperforms classical approaches and other learning based baselines.
* Neural Information Processing Systems (NeurIPS) 2018. Oral
Presentation
View paper on