 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Memorability for Robotic Interestingness via Unsupervised Online Learning
Paper and Code

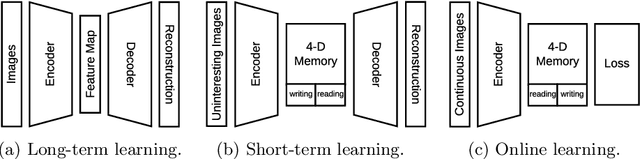

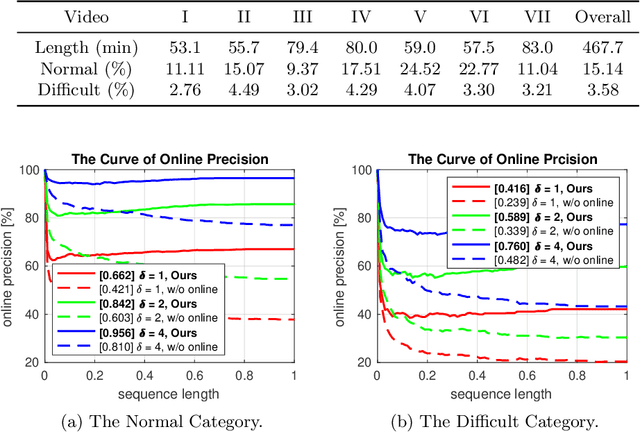
In this paper, we aim to solve the problem of interesting scene prediction for mobile robots. This area is currently under explored but is crucial for many practical applications such as autonomous exploration and decision making. First, we expect a robot to detect novel and interesting scenes in unknown environments and lose interests over time after repeatedly observing similar objects. Second, we expect the robots to learn from unbalanced data in a short time, as the robots normally only know the uninteresting scenes before they are deployed. Inspired by those industrial demands, we first propose a novel translation-invariant visual memory for recalling and identifying interesting scenes, then design a three-stage architecture of long-term, short-term, and online learning for human-like experience, environmental knowledge, and online adaption, respectively. It is demonstrated that our approach is able to learn online and find interesting scenes for practical exploration tasks. It also achieves a much higher accuracy than the state-of-the-art algorithm on very challenging robotic interestingness prediction datasets.