 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Localization for Autonomous Driving: Mapping the Accurate Location in the City Maze
Paper and Code
Aug 13, 2020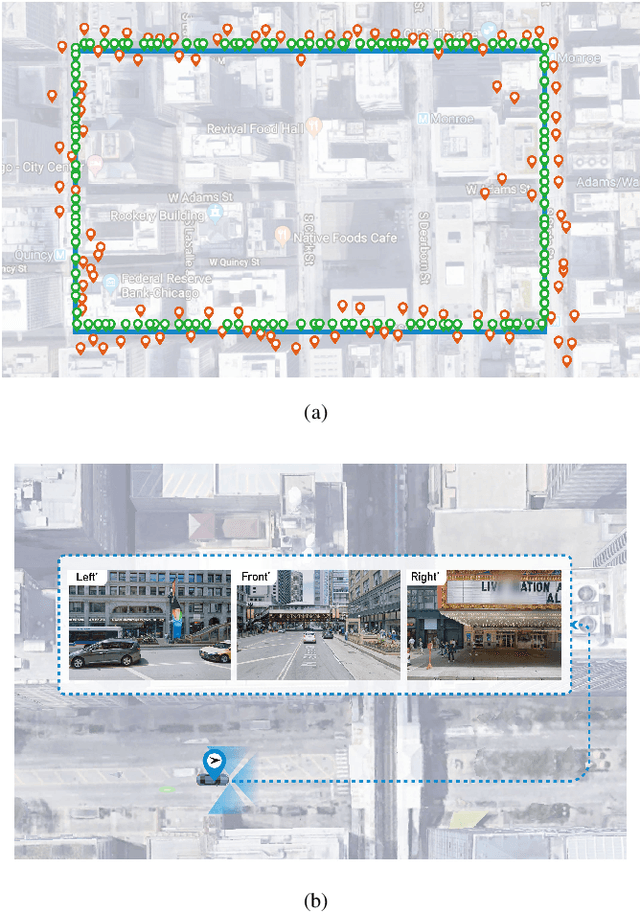

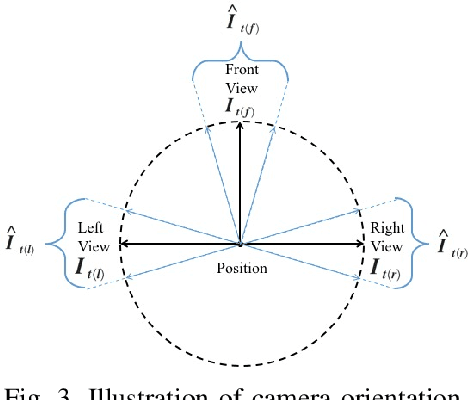
Accurate localization is a foundational capacity, required for autonomous vehicles to accomplish other tasks such as navigation or path planning. It is a common practice for vehicles to use GPS to acquire location information. However, the application of GPS can result in severe challenges when vehicles run within the inner city where different kinds of structures may shadow the GPS signal and lead to inaccurate location results. To address the localization challenges of urban settings, we propose a novel feature voting technique for visual localization. Different from the conventional front-view-based method, our approach employs views from three directions (front, left, and right) and thus significantly improves the robustness of location prediction. In our work, we craft the proposed feature voting method into three state-of-the-art visual localization networks and modify their architectures properly so that they can be applied for vehicular operation. Extensive field test results indicate that our approach can predict location robustly even in challenging inner-city settings. Our research sheds light on using the visual localization approach to help autonomous vehicles to find accurate location information in a city maze, within a desirable time constraint.