 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIP: Towards Universal Visual Reward and Representation via Value-Implicit Pre-Training
Paper and Code
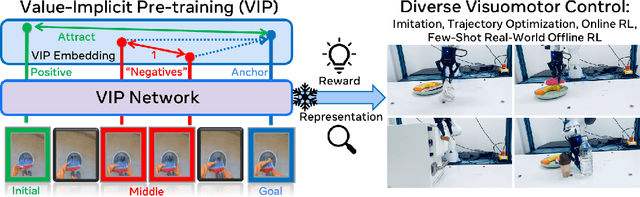


Reward and representation learning are two long-standing challenges for learning an expanding set of robot manipulation skills from sensory observations. Given the inherent cost and scarcity of in-domain, task-specific robot data, learning from large, diverse, offline human videos has emerged as a promising path towards acquiring a generally useful visual representation for control; however, how these human videos can be used for general-purpose reward learning remains an open question. We introduce $\textbf{V}$alue-$\textbf{I}$mplicit $\textbf{P}$re-training (VIP), a self-supervised pre-trained visual representation capable of generating dense and smooth reward functions for unseen robotic tasks. VIP casts representation learning from human videos as an offline goal-conditioned reinforcement learning problem and derives a self-supervised dual goal-conditioned value-function objective that does not depend on actions, enabling pre-training on unlabeled human videos. Theoretically, VIP can be understood as a novel implicit time contrastive objective that generates a temporally smooth embedding, enabling the value function to be implicitly defined via the embedding distance, which can then be used to construct the reward for any goal-image specified downstream task. Trained on large-scale Ego4D human videos and without any fine-tuning on in-domain, task-specific data, VIP's frozen representation can provide dense visual reward for an extensive set of simulated and $\textbf{real-robot}$ tasks, enabling diverse reward-based visual control methods and significantly outperforming all prior pre-trained representations. Notably, VIP can enable simple, $\textbf{few-shot}$ offline RL on a suite of real-world robot tasks with as few as 20 trajectories.