 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViNG: Learning Open-World Navigation with Visual Goals
Paper and Code
Dec 17, 2020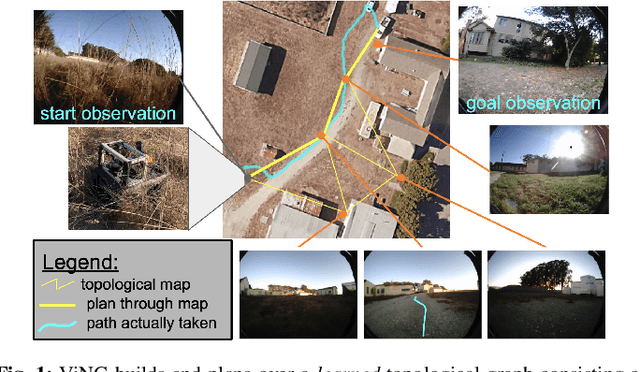
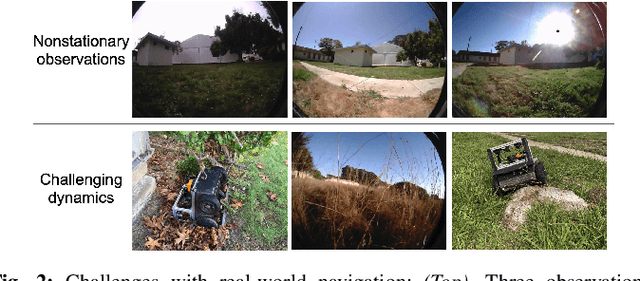
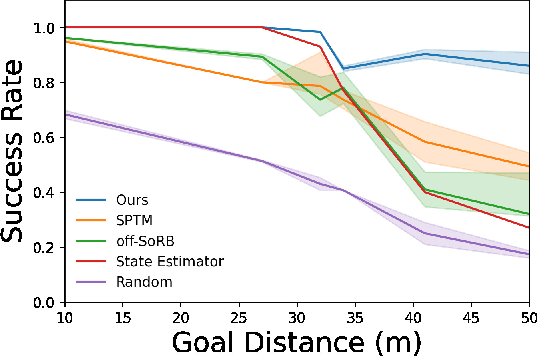
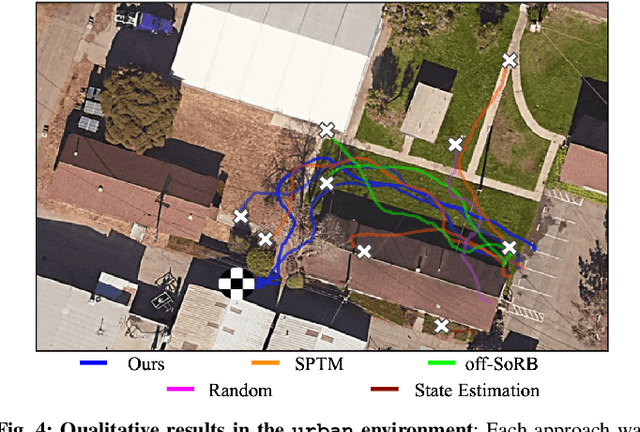
We propose a learning-based navigation system for reaching visually indicated goals and demonstrate this system on a real mobile robot platform. Learning provides an appealing alternative to conventional methods for robotic navigation: instead of reasoning about environments in terms of geometry and maps, learning can enable a robot to learn about navigational affordances, understand what types of obstacles are traversable (e.g., tall grass) or not (e.g., walls), and generalize over patterns in the environment. However, unlike conventional planning algorithms, it is harder to change the goal for a learned policy during deployment. We propose a method for learning to navigate towards a goal image of the desired destination. By combining a learned policy with a topological graph constructed out of previously observed data, our system can determine how to reach this visually indicated goal even in the presence of variable appearance and lighting. Three key insights, waypoint proposal, graph pruning and negative mining, enable our method to learn to navigate in real-world environments using only offline data, a setting where prior methods struggle. We instantiate our method on a real outdoor ground robot and show that our system, which we call ViNG, outperforms previously-proposed methods for goal-conditioned reinforcement learning, including other methods that incorporate reinforcement learning and search. We also study how ViNG generalizes to unseen environments and evaluate its ability to adapt to such an environment with growing experience. Finally, we demonstrate ViNG on a number of real-world applications, such as last-mile delivery and warehouse inspection. We encourage the reader to check out the videos of our experiments and demonstrations at our project website https://sites.google.com/view/ving-robot