 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIL-100: A New Dataset and A Baseline Model for Video Instance Lane Detection
Paper and Code
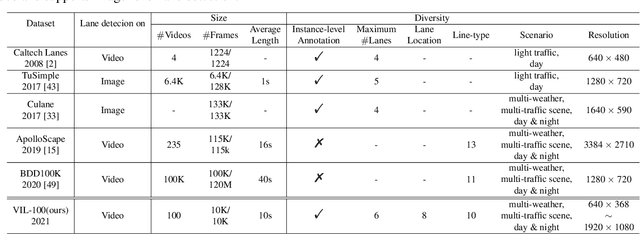

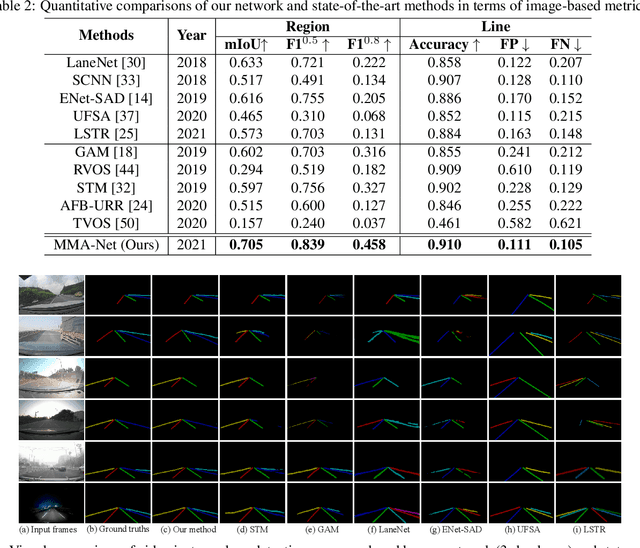
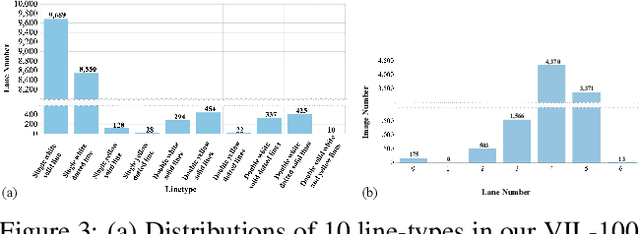
Lane detection plays a key role in autonomous driving. While car cameras always take streaming videos on the way, current lane detection works mainly focus on individual images (frames) by ignoring dynamics along the video. In this work, we collect a new video instance lane detection (VIL-100) dataset, which contains 100 videos with in total 10,000 frames, acquired from different real traffic scenarios. All the frames in each video are manually annotated to a high-quality instance-level lane annotation, and a set of frame-level and video-level metrics are included for quantitative performance evaluation. Moreover, we propose a new baseline model, named multi-level memory aggregation network (MMA-Net), for video instance lane detection. In our approach, the representation of current frame is enhanced by attentively aggregating both local and global memory features from other frames. Experiments on the new collected dataset show that the proposed MMA-Net outperforms state-of-the-art lane detection methods and video object segmentation methods. We release our dataset and code at https://github.com/yujun0-0/MMA-Net.