 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2HDM-Mono: A Framework of Building a Marking-Level HD Map with One or More Monocular Cameras
Paper and Code
Sep 16, 2022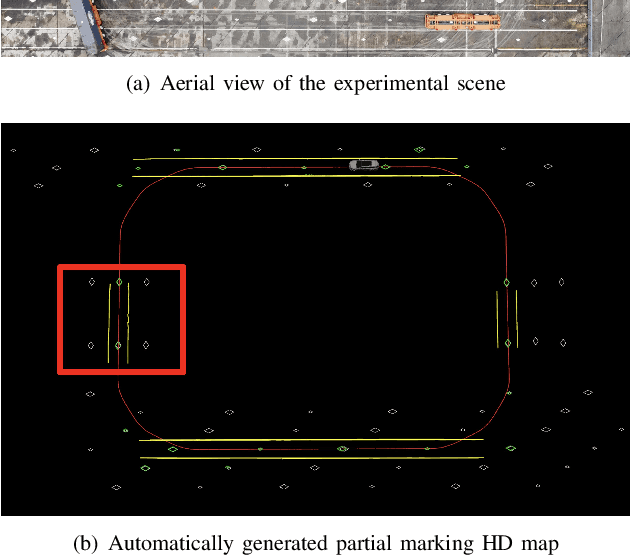
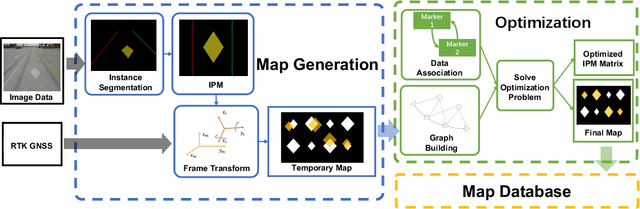

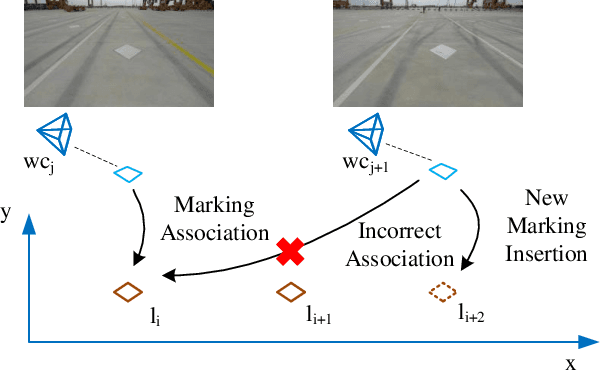
Marking-level high-definition maps (HD maps) are of great significance for autonomous vehicles, especially in large-scale, appearance-changing scenarios where autonomous vehicles rely on markings for localization and lanes for safe driving. In this paper, we propose a highly feasible framework for automatically building a marking-level HD map using a simple sensor setup (one or more monocular cameras). We optimize the position of the marking corners to fit the result of marking segmentation and simultaneously optimize the inverse perspective mapping (IPM) matrix of the corresponding camera to obtain an accurate transformation from the front view image to the bird's-eye view (BEV). In the quantitative evaluation, the built HD map almost attains centimeter-level accuracy. The accuracy of the optimized IPM matrix is similar to that of the manual calibration. The method can also be generalized to build HD maps in a broader sense by increasing the types of recognizable markings.