 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Bayesian Optimization to Guide Probing of a Flexible Environment for Simultaneous Registration and Stiffness Mapping
Paper and Code
Sep 19, 2015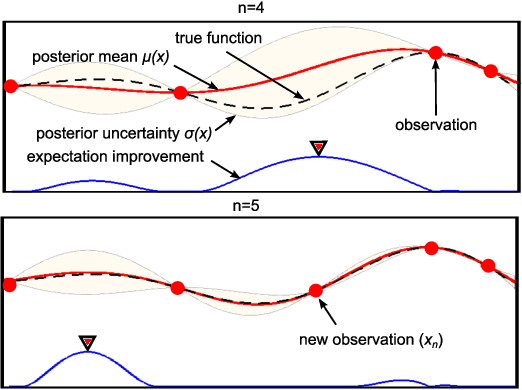
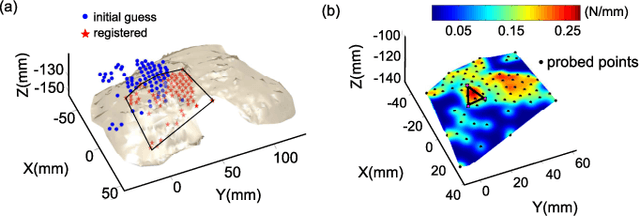
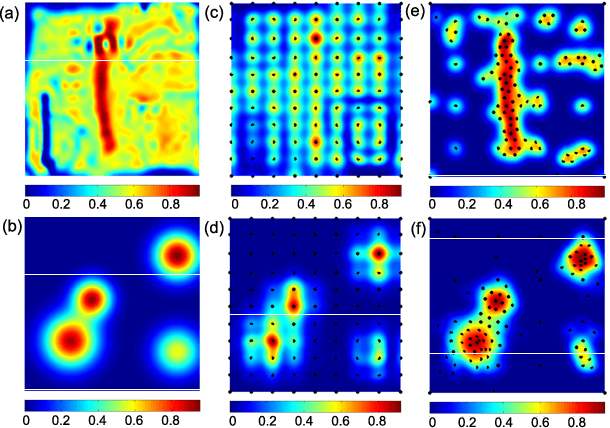
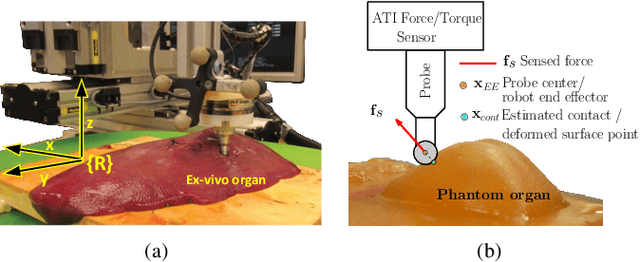
One of the goals of computer-aided surgery is to match intraoperative data to preoperative images of the anatomy and add complementary information that can facilitate the task of surgical navigation. In this context, mechanical palpation can reveal critical anatomical features such as arteries and cancerous lumps which are stiffer that the surrounding tissue. This work uses position and force measurements obtained during mechanical palpation for registration and stiffness mapping. Prior approaches, including our own, exhaustively palpated the entire organ to achieve this goal. To overcome the costly palpation of the entire organ, a Bayesian optimization framework is introduced to guide the end effector to palpate stiff regions while simultaneously updating the registration of the end effector to an a priori geometric model of the organ, hence enabling the fusion of ntraoperative data into the a priori model obtained through imaging. This new framework uses Gaussian processes to model the stiffness distribution and Bayesian optimization to direct where to sample next for maximum information gain. The proposed method was evaluated with experimental data obtained using a Cartesian robot interacting with a silicone organ model and an ex vivo porcine liver.