 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Segmentation in Real-World Images via Spelke Object Inference
Paper and Code
May 17, 2022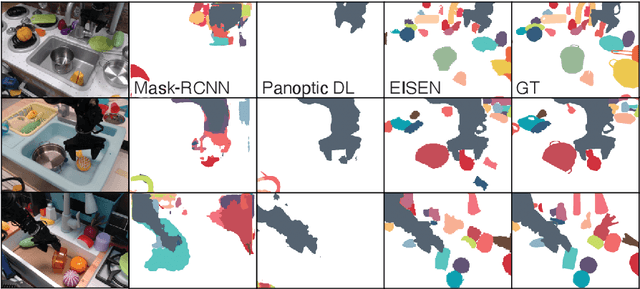
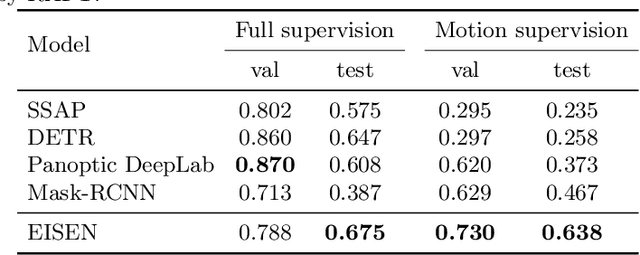
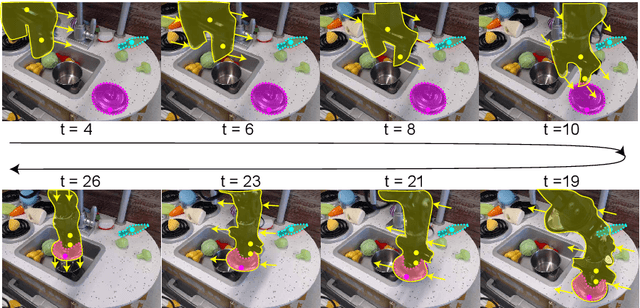

Self-supervised category-agnostic segmentation of real-world images into objects is a challenging open problem in computer vision. Here, we show how to learn static grouping priors from motion self-supervision, building on the cognitive science notion of Spelke Objects: groupings of stuff that move together. We introduce Excitatory-Inhibitory Segment Extraction Network (EISEN), which learns from optical flow estimates to extract pairwise affinity graphs for static scenes. EISEN then produces segments from affinities using a novel graph propagation and competition mechanism. Correlations between independent sources of motion (e.g. robot arms) and objects they move are resolved into separate segments through a bootstrapping training process. We show that EISEN achieves a substantial improvement in the state of the art for self-supervised segmentation on challenging synthetic and real-world robotic image datasets. We also present an ablation analysis illustrating the importance of each element of the EISEN architecture.