 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Encoded Multi-Modal Fusion for Robust Object Detection in Autonomous Driving
Paper and Code
Jul 30, 2023
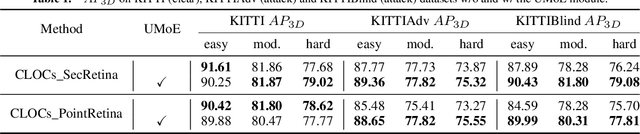

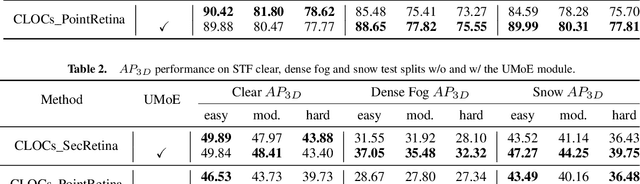
Multi-modal fusion has shown initial promising results for object detection of autonomous driving perception. However, many existing fusion schemes do not consider the quality of each fusion input and may suffer from adverse conditions on one or more sensors. While predictive uncertainty has been applied to characterize single-modal object detection performance at run time, incorporating uncertainties into the multi-modal fusion still lacks effective solutions due primarily to the uncertainty's cross-modal incomparability and distinct sensitivities to various adverse conditions. To fill this gap, this paper proposes Uncertainty-Encoded Mixture-of-Experts (UMoE) that explicitly incorporates single-modal uncertainties into LiDAR-camera fusion. UMoE uses individual expert network to process each sensor's detection result together with encoded uncertainty. Then, the expert networks' outputs are analyzed by a gating network to determine the fusion weights. The proposed UMoE module can be integrated into any proposal fusion pipeline. Evaluation shows that UMoE achieves a maximum of 10.67%, 3.17%, and 5.40% performance gain compared with the state-of-the-art proposal-level multi-modal object detectors under extreme weather, adversarial, and blinding attack scenarios.