 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformers in 3D Point Clouds: A Survey
Paper and Code
May 16, 2022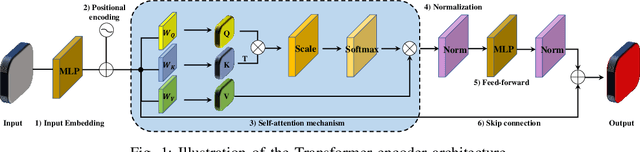
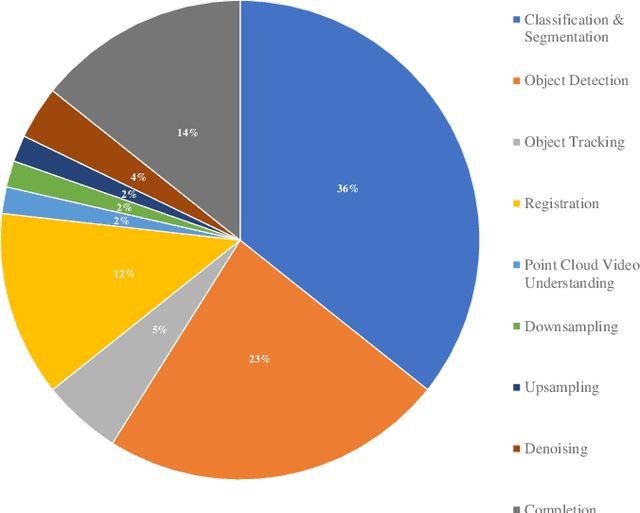
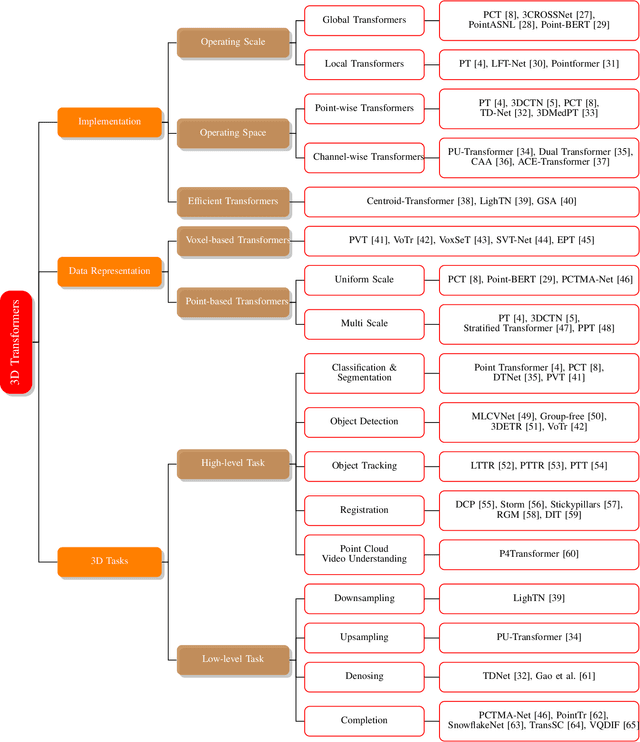
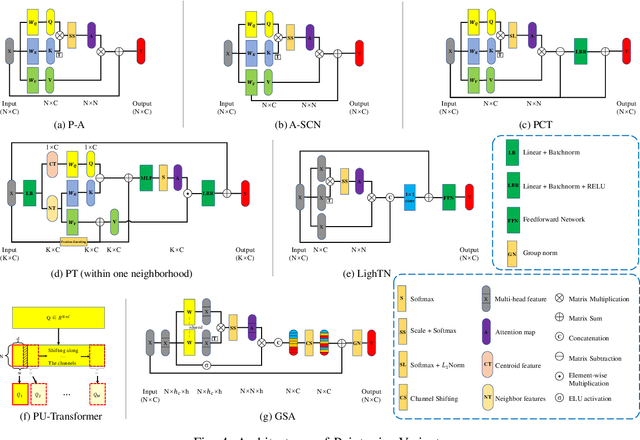
In recent years, Transformer models have been proven to have the remarkable ability of long-range dependencies modeling. They have achieved satisfactory results both in Natural Language Processing (NLP) and image processing. This significant achievement sparks great interest among researchers in 3D point cloud processing to apply them to various 3D tasks. Due to the inherent permutation invariance and strong global feature learning ability, 3D Transformers are well suited for point cloud processing and analysis. They have achieved competitive or even better performance compared to the state-of-the-art non-Transformer algorithms. This survey aims to provide a comprehensive overview of 3D Transformers designed for various tasks (e.g. point cloud classification, segmentation, object detection, and so on). We start by introducing the fundamental components of the general Transformer and providing a brief description of its application in 2D and 3D fields. Then, we present three different taxonomies (i.e., Transformer implementation-based taxonomy, data representation-based taxonomy, and task-based taxonomy) for method classification, which allows us to analyze involved methods from multiple perspectives. Furthermore, we also conduct an investigation of 3D self-attention mechanism variants designed for performance improvement. To demonstrate the superiority of 3D Transformers, we compare the performance of Transformer-based algorithms in terms of point cloud classification, segmentation, and object detection. Finally, we point out three potential future research directions, expecting to provide some benefit references for the development of 3D Transformers.