 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajDiffuse: A Conditional Diffusion Model for Environment-Aware Trajectory Prediction
Paper and Code
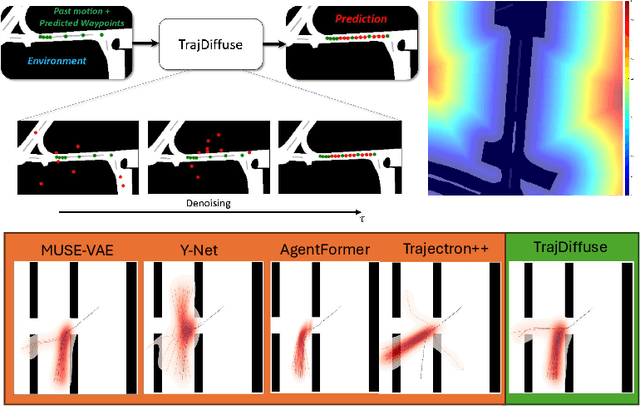
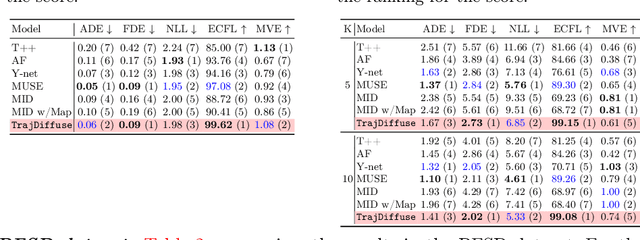
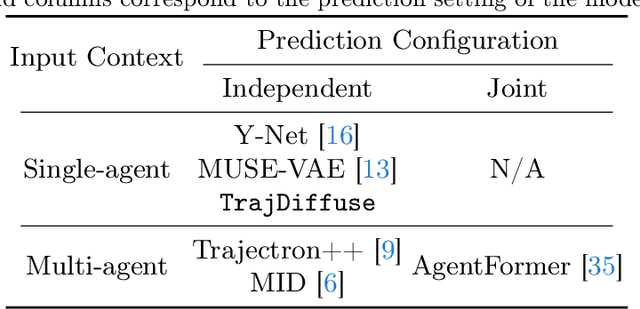
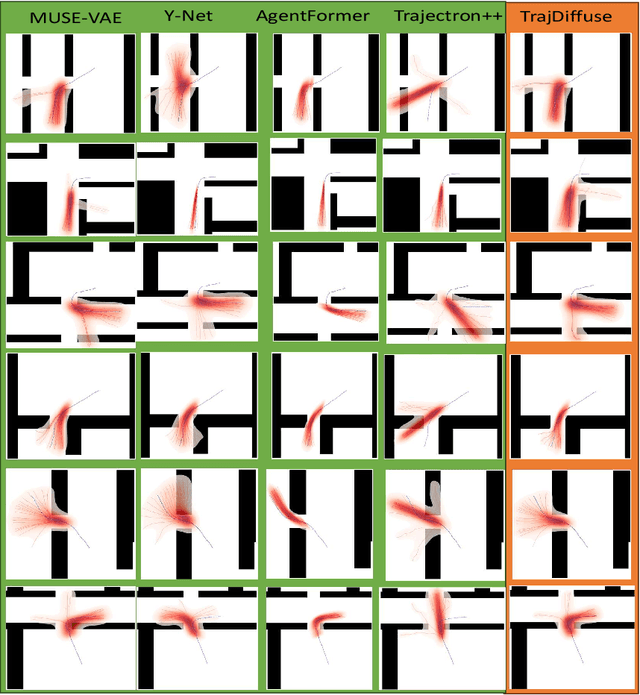
Accurate prediction of human or vehicle trajectories with good diversity that captures their stochastic nature is an essential task for many applications. However, many trajectory prediction models produce unreasonable trajectory samples that focus on improving diversity or accuracy while neglecting other key requirements, such as collision avoidance with the surrounding environment. In this work, we propose TrajDiffuse, a planning-based trajectory prediction method using a novel guided conditional diffusion model. We form the trajectory prediction problem as a denoising impaint task and design a map-based guidance term for the diffusion process. TrajDiffuse is able to generate trajectory predictions that match or exceed the accuracy and diversity of the SOTA, while adhering almost perfectly to environmental constraints. We demonstrate the utility of our model through experiments on the nuScenes and PFSD datasets and provide an extensive benchmark analysis against the SOTA methods.