 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Panoptic 3D Parsing for Single Image in the Wild
Paper and Code
Nov 29, 2021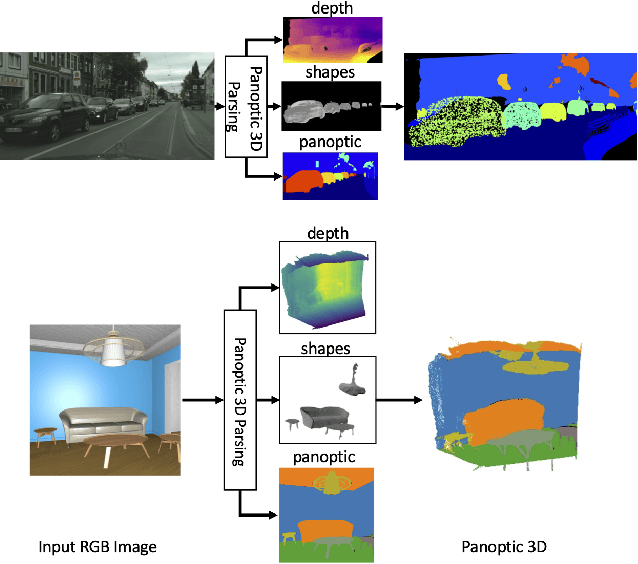
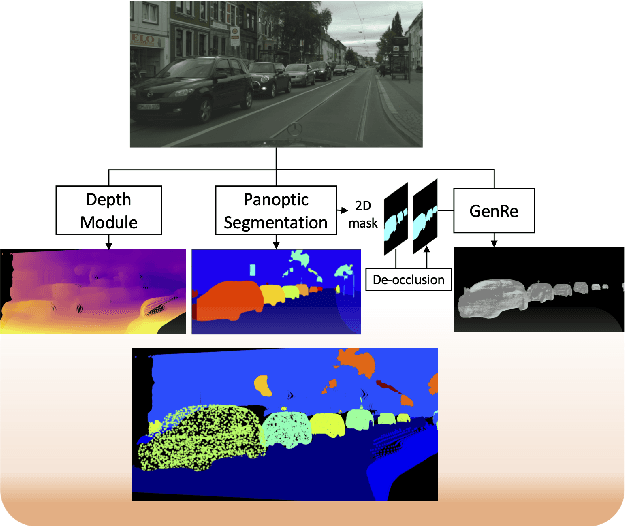
Performing single image holistic understanding and 3D reconstruction is a central task in computer vision. This paper presents an integrated system that performs dense scene labeling, object detection, instance segmentation, depth estimation, 3D shape reconstruction, and 3D layout estimation for indoor and outdoor scenes from a single RGB image. We name our system panoptic 3D parsing (Panoptic3D) in which panoptic segmentation ("stuff" segmentation and "things" detection/segmentation) with 3D reconstruction is performed. We design a stage-wise system, Panoptic3D (stage-wise), where a complete set of annotations is absent. Additionally, we present an end-to-end pipeline, Panoptic3D (end-to-end), trained on a synthetic dataset with a full set of annotations. We show results on both indoor (3D-FRONT) and outdoor (COCO and Cityscapes) scenes. Our proposed panoptic 3D parsing framework points to a promising direction in computer vision. Panoptic3D can be applied to a variety of applications, including autonomous driving, mapping, robotics, design, computer graphics, robotics, human-computer interaction, and augmented reality.