 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Hierarchical Task Decomposition using Deep Reinforcement Learning for Pick and Place Subtasks
Paper and Code
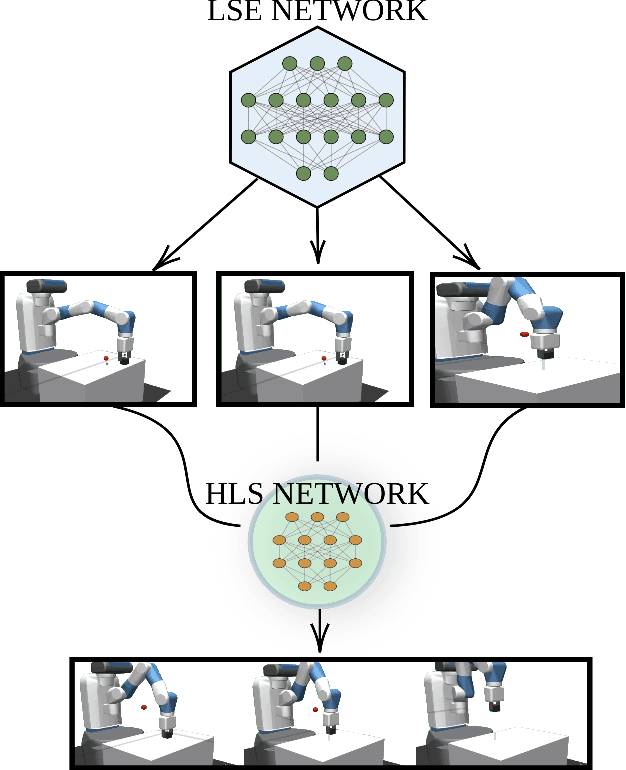


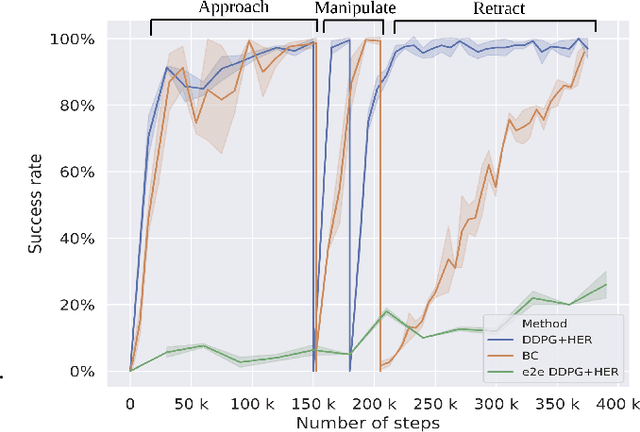
Deep Reinforcement Learning (DRL) is emerging as a promising approach to generate adaptive behaviors for robotic platforms. However, a major drawback of using DRL is the data-hungry training regime that requires millions of trial and error attempts, which is impractical when running experiments on robotic systems. To address this issue, we propose a multi-subtask reinforcement learning method where complex tasks are decomposed manually into low-level subtasks by leveraging human domain knowledge. These subtasks can be parametrized as expert networks and learned via existing DRL methods. Trained subtasks can then be composed with a high-level choreographer. As a testbed, we use a pick and place robotic simulator to demonstrate our methodology, and show that our method outperforms an imitation learning-based method and reaches a high success rate compared to an end-to-end learning approach. Moreover, we transfer the learned behavior in a different robotic environment that allows us to exploit sim-to-real transfer and demonstrate the trajectories in a real robotic system. Our training regime is carried out using a central processing unit (CPU)-based system, which demonstrates the data-efficient properties of our approach.