 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Coordinated Robot Motions: End-to-End Learning of Motion Policies on Transform Trees
Paper and Code
Dec 24, 2020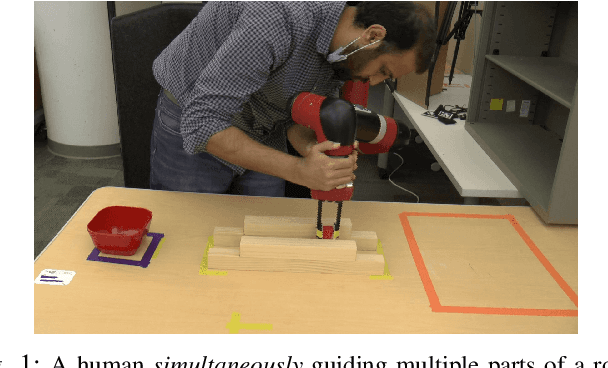
Robotic tasks often require generation of motions that satisfy multiple motion constraints, that may live on different parts of a robot's body. In this paper, we address the challenge of learning motion policies to generate motions for execution of such tasks. Additionally, to encode multiple motion constraints and their synergies, we enforce structure in our motion policy. Specifically, the structure results from decomposing a motion policy into multiple subtask policies, whereby each subtask policy dictates a particular subtask behavior. By learning the subtask policies together in an end-to-end fashion, our formulation not only learns coordination between subtask behaviors, but also learns how to trade them off against default behaviors that may exist. Furthermore, due to our choice of parameterization for the constituting subtask policies, our overall structured motion policy is guaranteed to generate stable motions. To corroborate our theory, we also present qualitative and quantitative evaluations on multiple robotic tasks.