 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTornadoDrone: Bio-inspired DRL-based Drone Landing on 6D Platform with Wind Force Disturbances
Paper and Code
Jun 25, 2024
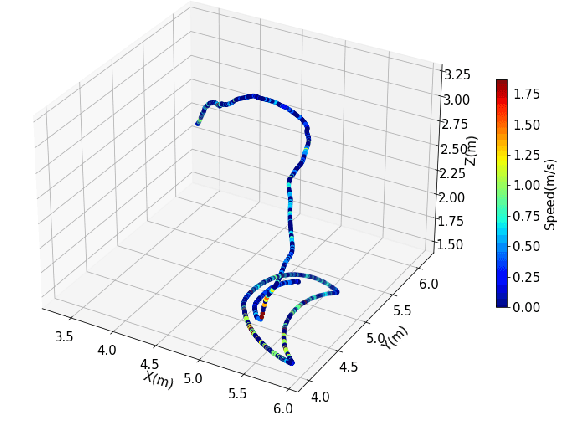
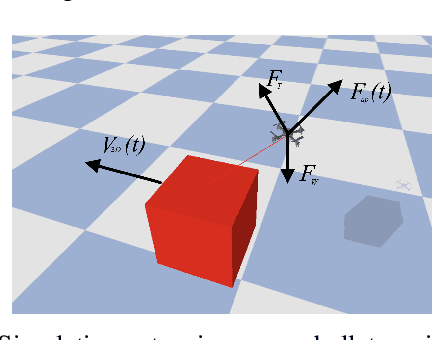
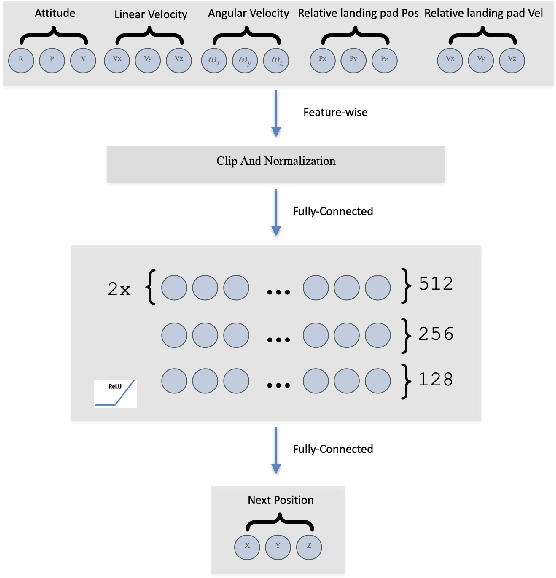
Autonomous drone navigation faces a critical challenge in achieving accurate landings on dynamic platforms, especially under unpredictable conditions such as wind turbulence. Our research introduces TornadoDrone, a novel Deep Reinforcement Learning (DRL) model that adopts bio-inspired mechanisms to adapt to wind forces, mirroring the natural adaptability seen in birds. This model, unlike traditional approaches, derives its adaptability from indirect cues such as changes in position and velocity, rather than direct wind force measurements. TornadoDrone was rigorously trained in the gym-pybullet-drone simulator, which closely replicates the complexities of wind dynamics in the real world. Through extensive testing with Crazyflie 2.1 drones in both simulated and real windy conditions, TornadoDrone demonstrated a high performance in maintaining high-precision landing accuracy on moving platforms, surpassing conventional control methods such as PID controllers with Extended Kalman Filters. The study not only highlights the potential of DRL to tackle complex aerodynamic challenges but also paves the way for advanced autonomous systems that can adapt to environmental changes in real-time. The success of TornadoDrone signifies a leap forward in drone technology, particularly for critical applications such as surveillance and emergency response, where reliability and precision are paramount.