 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Power of the Senses: Generalizable Manipulation from Vision and Touch through Masked Multimodal Learning
Paper and Code
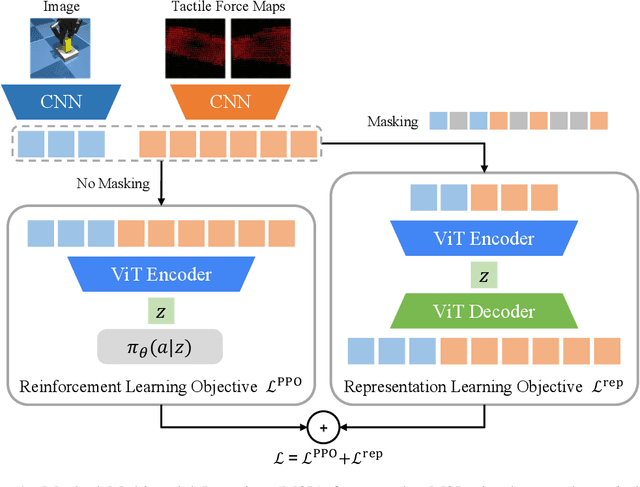
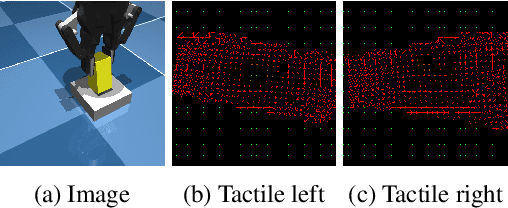

Humans rely on the synergy of their senses for most essential tasks. For tasks requiring object manipulation, we seamlessly and effectively exploit the complementarity of our senses of vision and touch. This paper draws inspiration from such capabilities and aims to find a systematic approach to fuse visual and tactile information in a reinforcement learning setting. We propose Masked Multimodal Learning (M3L), which jointly learns a policy and visual-tactile representations based on masked autoencoding. The representations jointly learned from vision and touch improve sample efficiency, and unlock generalization capabilities beyond those achievable through each of the senses separately. Remarkably, representations learned in a multimodal setting also benefit vision-only policies at test time. We evaluate M3L on three simulated environments with both visual and tactile observations: robotic insertion, door opening, and dexterous in-hand manipulation, demonstrating the benefits of learning a multimodal policy. Code and videos of the experiments are available at https://sferrazza.cc/m3l_site.