 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTernary Policy Iteration Algorithm for Nonlinear Robust Control
Paper and Code
Jul 14, 2020
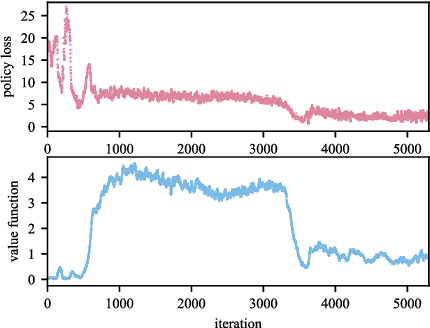

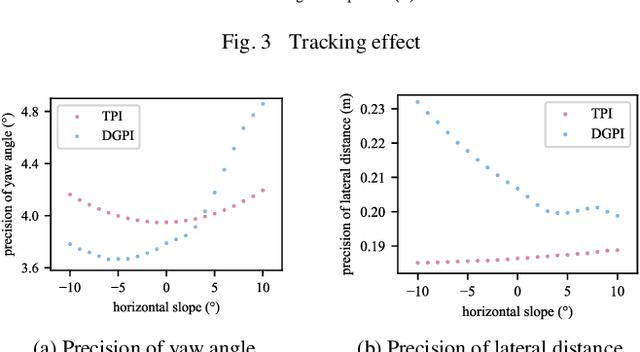
The uncertainties in plant dynamics remain a challenge for nonlinear control problems. This paper develops a ternary policy iteration (TPI) algorithm for solving nonlinear robust control problems with bounded uncertainties. The controller and uncertainty of the system are considered as game players, and the robust control problem is formulated as a two-player zero-sum differential game. In order to solve the differential game, the corresponding Hamilton-Jacobi-Isaacs (HJI) equation is then derived. Three loss functions and three update phases are designed to match the identity equation, minimization and maximization of the HJI equation, respectively. These loss functions are defined by the expectation of the approximate Hamiltonian in a generated state set to prevent operating all the states in the entire state set concurrently. The parameters of value function and policies are directly updated by diminishing the designed loss functions using the gradient descent method. Moreover, zero-initialization can be applied to the parameters of the control policy. The effectiveness of the proposed TPI algorithm is demonstrated through two simulation studies. The simulation results show that the TPI algorithm can converge to the optimal solution for the linear plant, and has high resistance to disturbances for the nonlinear plant.