 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructure Guided Lane Detection
Paper and Code
May 12, 2021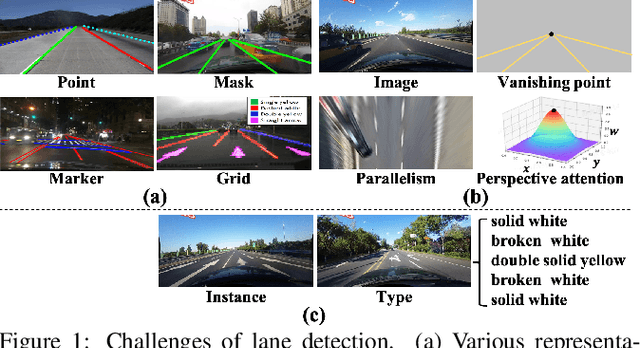
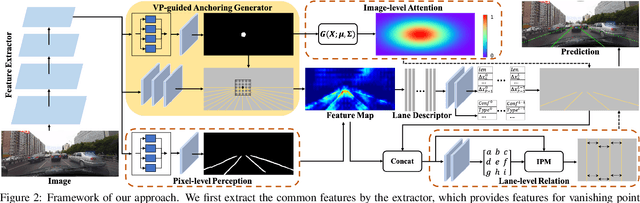
Recently, lane detection has made great progress with the rapid development of deep neural networks and autonomous driving. However, there exist three mainly problems including characterizing lanes, modeling the structural relationship between scenes and lanes, and supporting more attributes (e.g., instance and type) of lanes. In this paper, we propose a novel structure guided framework to solve these problems simultaneously. In the framework, we first introduce a new lane representation to characterize each instance. Then a topdown vanishing point guided anchoring mechanism is proposed to produce intensive anchors, which efficiently capture various lanes. Next, multi-level structural constraints are used to improve the perception of lanes. In the process, pixel-level perception with binary segmentation is introduced to promote features around anchors and restore lane details from bottom up, a lane-level relation is put forward to model structures (i.e., parallel) around lanes, and an image-level attention is used to adaptively attend different regions of the image from the perspective of scenes. With the help of structural guidance, anchors are effectively classified and regressed to obtain precise locations and shapes. Extensive experiments on public benchmark datasets show that the proposed approach outperforms state-of-the-art methods with 117 FPS on a single GPU.