 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamYOLO: Real-time Object Detection for Streaming Perception
Paper and Code
Jul 21, 2022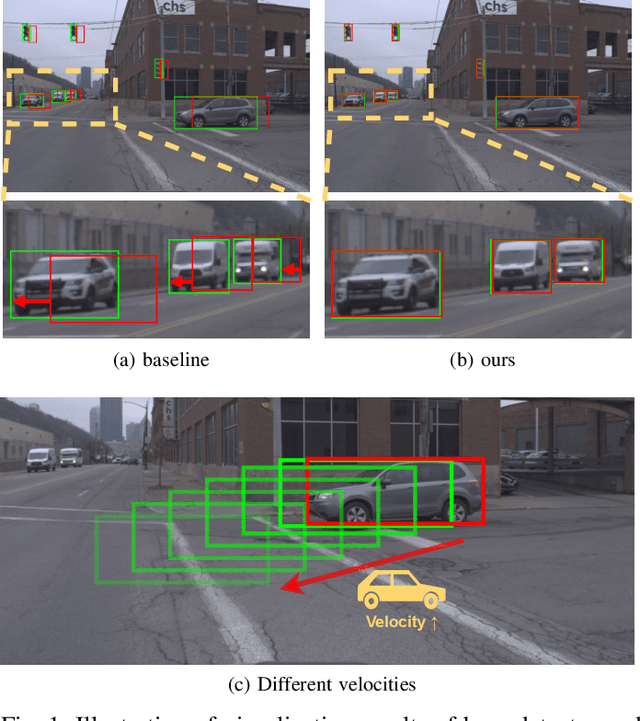
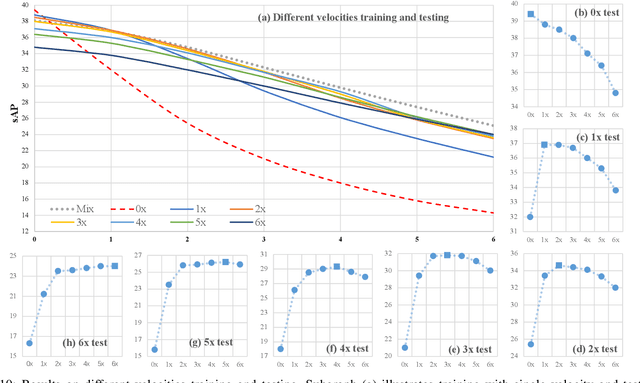
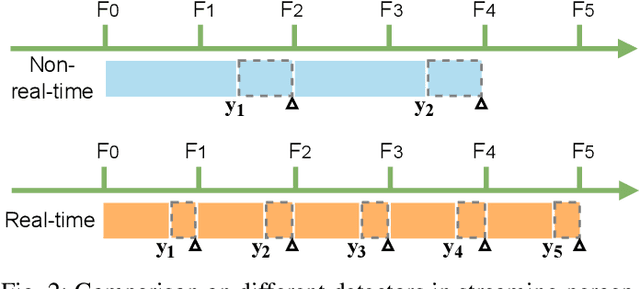
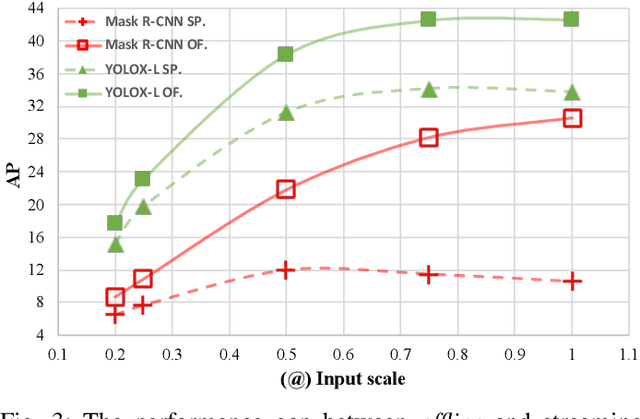
The perceptive models of autonomous driving require fast inference within a low latency for safety. While existing works ignore the inevitable environmental changes after processing, streaming perception jointly evaluates the latency and accuracy into a single metric for video online perception, guiding the previous works to search trade-offs between accuracy and speed. In this paper, we explore the performance of real time models on this metric and endow the models with the capacity of predicting the future, significantly improving the results for streaming perception. Specifically, we build a simple framework with two effective modules. One is a Dual Flow Perception module (DFP). It consists of dynamic flow and static flow in parallel to capture moving tendency and basic detection feature, respectively. Trend Aware Loss (TAL) is the other module which adaptively generates loss weight for each object with its moving speed. Realistically, we consider multiple velocities driving scene and further propose Velocity-awared streaming AP (VsAP) to jointly evaluate the accuracy. In this realistic setting, we design a efficient mix-velocity training strategy to guide detector perceive any velocities. Our simple method achieves the state-of-the-art performance on Argoverse-HD dataset and improves the sAP and VsAP by 4.7% and 8.2% respectively compared to the strong baseline, validating its effectiveness.