 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Trajectory Prediction under Unstructured Constraints
Paper and Code
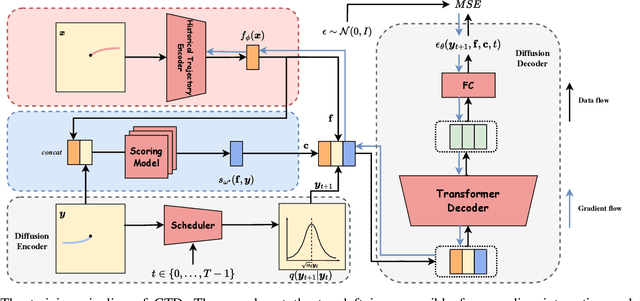
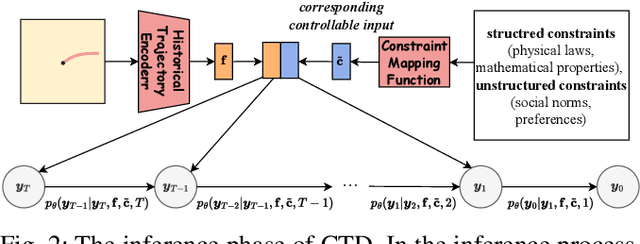
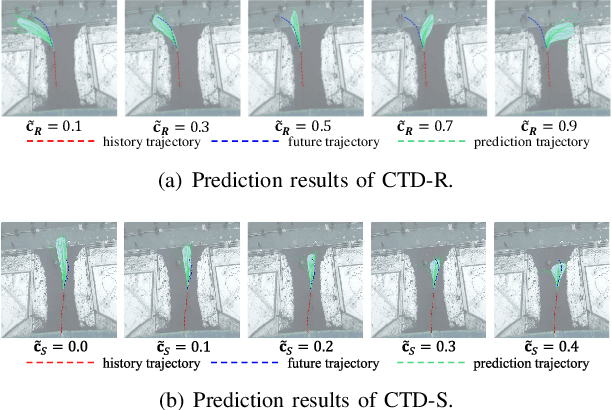
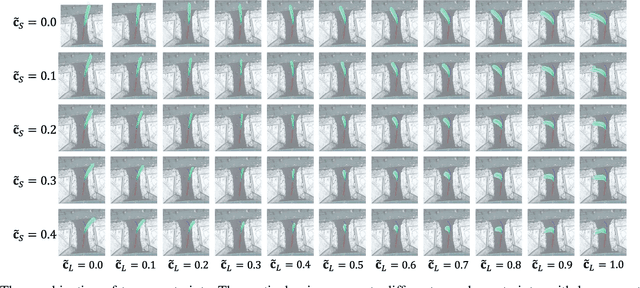
Trajectory prediction facilitates effective planning and decision-making, while constrained trajectory prediction integrates regulation into prediction. Recent advances in constrained trajectory prediction focus on structured constraints by constructing optimization objectives. However, handling unstructured constraints is challenging due to the lack of differentiable formal definitions. To address this, we propose a novel method for constrained trajectory prediction using a conditional generative paradigm, named Controllable Trajectory Diffusion (CTD). The key idea is that any trajectory corresponds to a degree of conformity to a constraint. By quantifying this degree and treating it as a condition, a model can implicitly learn to predict trajectories under unstructured constraints. CTD employs a pre-trained scoring model to predict the degree of conformity (i.e., a score), and uses this score as a condition for a conditional diffusion model to generate trajectories. Experimental results demonstrate that CTD achieves high accuracy on the ETH/UCY and SDD benchmarks. Qualitative analysis confirms that CTD ensures adherence to unstructured constraints and can predict trajectories that satisfy combinatorial constraints.