 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState Action Separable Reinforcement Learning
Paper and Code
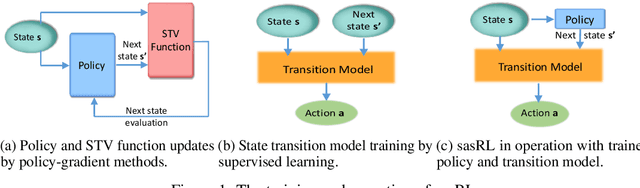
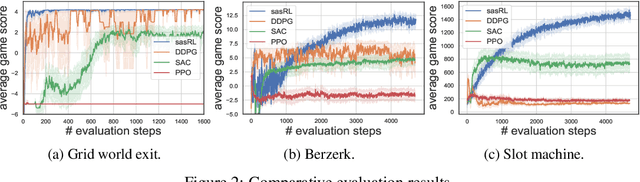
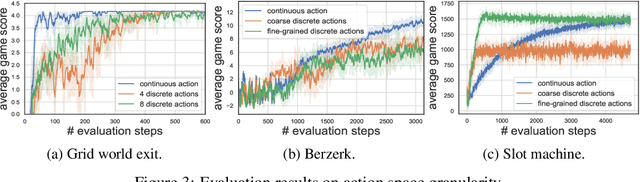
Reinforcement Learning (RL) based methods have seen their paramount successes in solving serial decision-making and control problems in recent years. For conventional RL formulations, Markov Decision Process (MDP) and state-action-value function are the basis for the problem modeling and policy evaluation. However, several challenging issues still remain. Among most cited issues, the enormity of state/action space is an important factor that causes inefficiency in accurately approximating the state-action-value function. We observe that although actions directly define the agents' behaviors, for many problems the next state after a state transition matters more than the action taken, in determining the return of such a state transition. In this regard, we propose a new learning paradigm, State Action Separable Reinforcement Learning (sasRL), wherein the action space is decoupled from the value function learning process for higher efficiency. Then, a light-weight transition model is learned to assist the agent to determine the action that triggers the associated state transition. In addition, our convergence analysis reveals that under certain conditions, the convergence time of sasRL is $O(T^{1/k})$, where $T$ is the convergence time for updating the value function in the MDP-based formulation and $k$ is a weighting factor. Experiments on several gaming scenarios show that sasRL outperforms state-of-the-art MDP-based RL algorithms by up to $75\%$.