 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-View 3D Reconstruction via SO(2)-Equivariant Gaussian Sculpting Networks
Paper and Code
Sep 11, 2024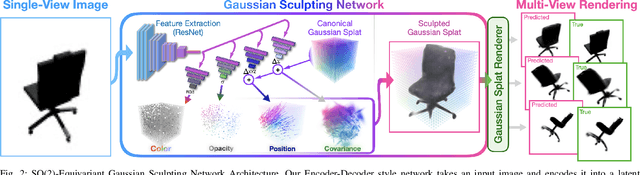
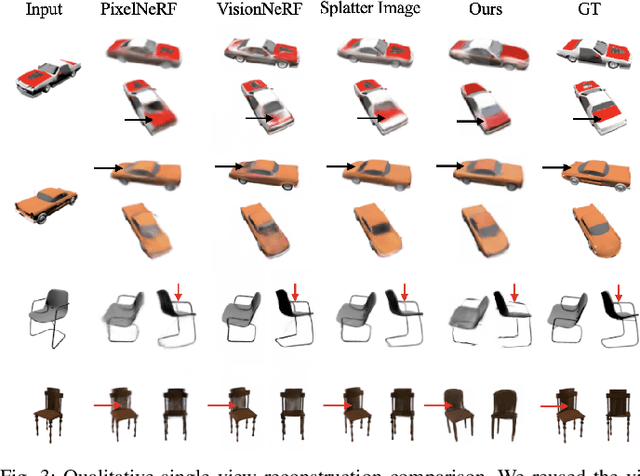
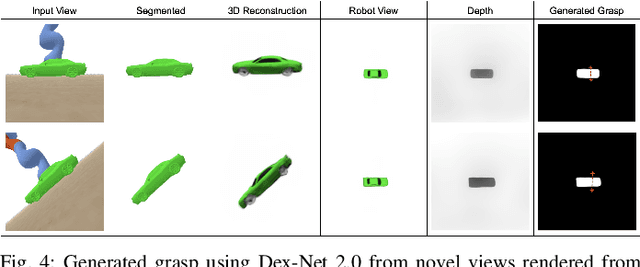
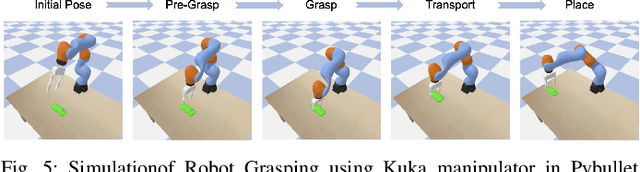
This paper introduces SO(2)-Equivariant Gaussian Sculpting Networks (GSNs) as an approach for SO(2)-Equivariant 3D object reconstruction from single-view image observations. GSNs take a single observation as input to generate a Gaussian splat representation describing the observed object's geometry and texture. By using a shared feature extractor before decoding Gaussian colors, covariances, positions, and opacities, GSNs achieve extremely high throughput (>150FPS). Experiments demonstrate that GSNs can be trained efficiently using a multi-view rendering loss and are competitive, in quality, with expensive diffusion-based reconstruction algorithms. The GSN model is validated on multiple benchmark experiments. Moreover, we demonstrate the potential for GSNs to be used within a robotic manipulation pipeline for object-centric grasping.