 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSim-to-Real Transfer of Robotic Assembly with Visual Inputs Using CycleGAN and Force Control
Paper and Code
Aug 30, 2022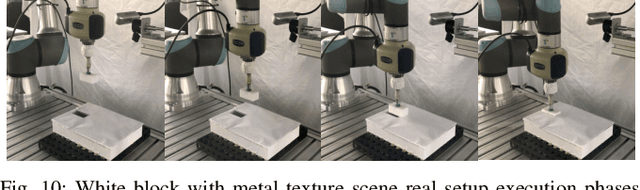
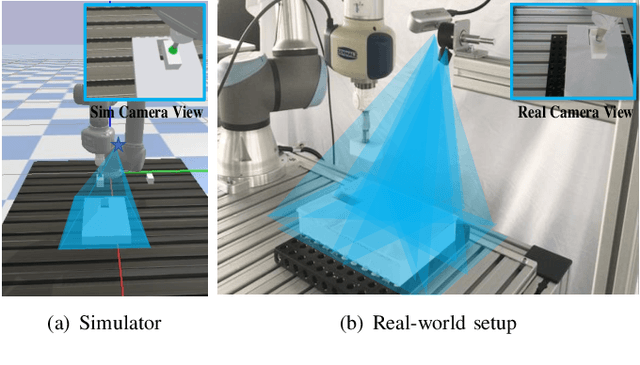
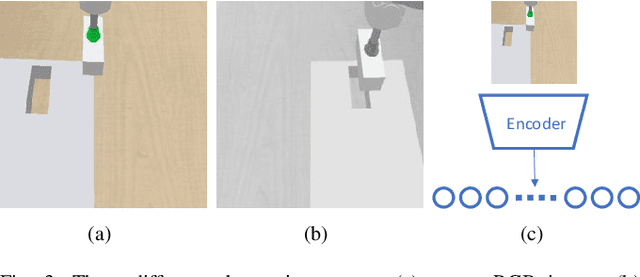
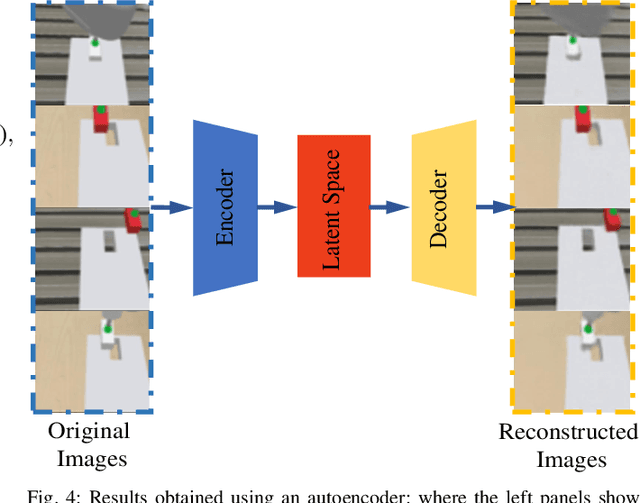
Recently, deep reinforcement learning (RL) has shown some impressive successes in robotic manipulation applications. However, training robots in the real world is nontrivial owing to sample efficiency and safety concerns. Sim-to-real transfer is proposed to address the aforementioned concerns but introduces a new issue called the reality gap. In this work, we introduce a sim-to-real learning framework for vision-based assembly tasks and perform training in a simulated environment by employing inputs from a single camera to address the aforementioned issues. We present a domain adaptation method based on cycle-consistent generative adversarial networks (CycleGAN) and a force control transfer approach to bridge the reality gap. We demonstrate that the proposed framework trained in a simulated environment can be successfully transferred to a real peg-in-hole setup.