 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSilver-Bullet-3D at ManiSkill 2021: Learning-from-Demonstrations and Heuristic Rule-based Methods for Object Manipulation
Paper and Code
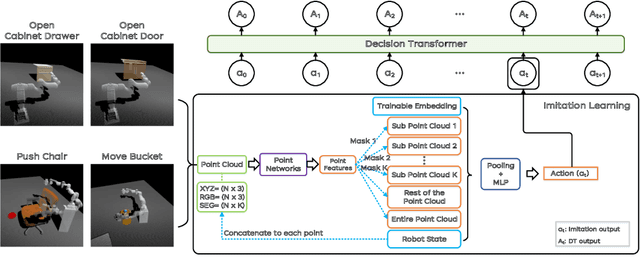

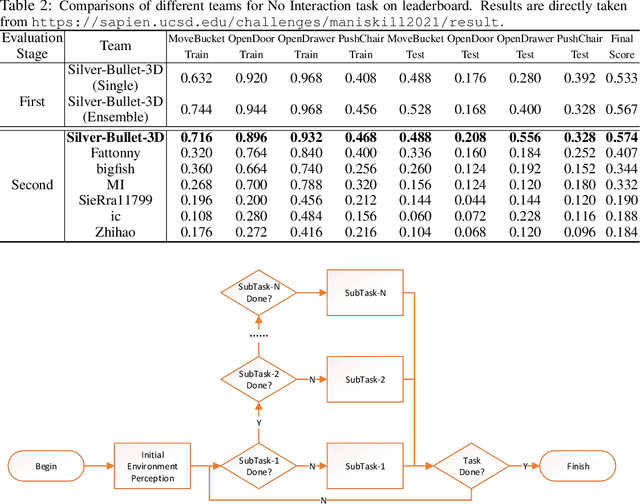
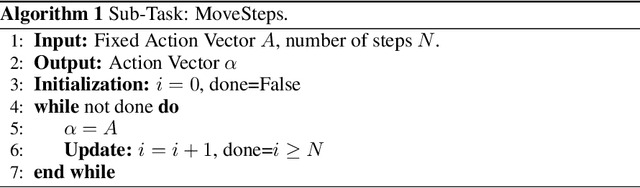
This paper presents an overview and comparative analysis of our systems designed for the following two tracks in SAPIEN ManiSkill Challenge 2021: No Interaction Track: The No Interaction track targets for learning policies from pre-collected demonstration trajectories. We investigate both imitation learning-based approach, i.e., imitating the observed behavior using classical supervised learning techniques, and offline reinforcement learning-based approaches, for this track. Moreover, the geometry and texture structures of objects and robotic arms are exploited via Transformer-based networks to facilitate imitation learning. No Restriction Track: In this track, we design a Heuristic Rule-based Method (HRM) to trigger high-quality object manipulation by decomposing the task into a series of sub-tasks. For each sub-task, the simple rule-based controlling strategies are adopted to predict actions that can be applied to robotic arms. To ease the implementations of our systems, all the source codes and pre-trained models are available at \url{https://github.com/caiqi/Silver-Bullet-3D/}.