 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Information-Based Safe And Efficient Behavior Planning For Connected Autonomous Vehicles
Paper and Code
Feb 15, 2023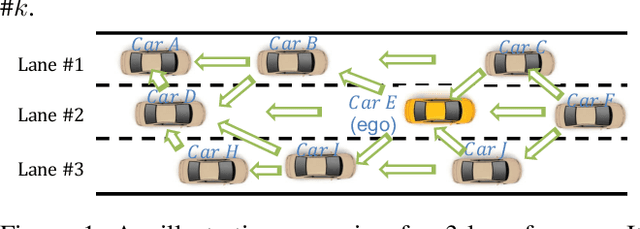
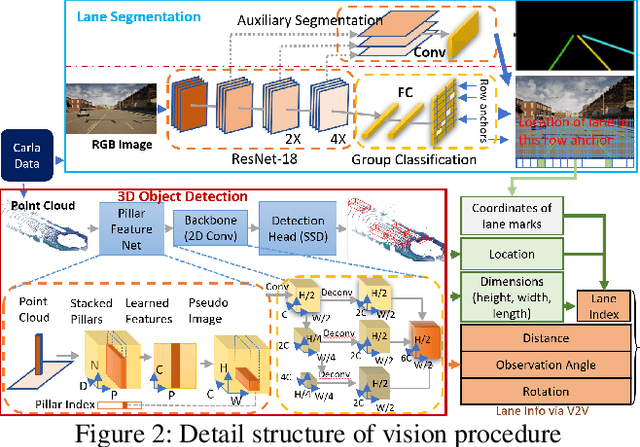
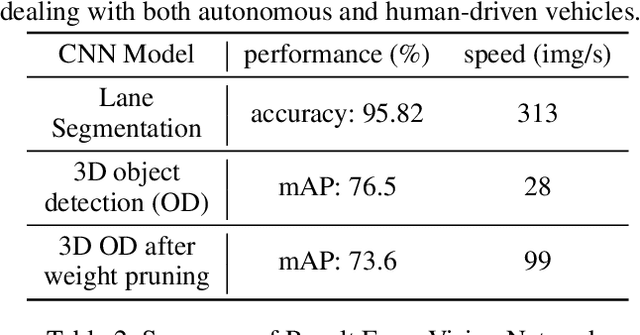
The recent advancements in wireless technology enable connected autonomous vehicles (CAVs) to gather data via vehicle-to-vehicle (V2V) communication, such as processed LIDAR and camera data from other vehicles. In this work, we design an integrated information sharing and safe multi-agent reinforcement learning (MARL) framework for CAVs, to take advantage of the extra information when making decisions to improve traffic efficiency and safety. We first use weight pruned convolutional neural networks (CNN) to process the raw image and point cloud LIDAR data locally at each autonomous vehicle, and share CNN-output data with neighboring CAVs. We then design a safe actor-critic algorithm that utilizes both a vehicle's local observation and the information received via V2V communication to explore an efficient behavior planning policy with safety guarantees. Using the CARLA simulator for experiments, we show that our approach improves the CAV system's efficiency in terms of average velocity and comfort under different CAV ratios and different traffic densities. We also show that our approach avoids the execution of unsafe actions and always maintains a safe distance from other vehicles. We construct an obstacle-at-corner scenario to show that the shared vision can help CAVs to observe obstacles earlier and take action to avoid traffic jams.