 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSequential Decision Fusion for Environmental Classification in Assistive Walking
Paper and Code
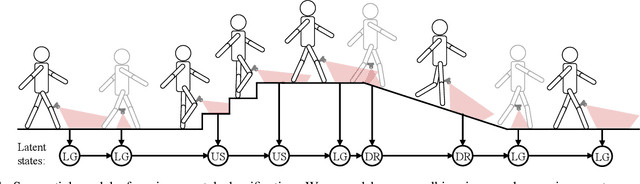
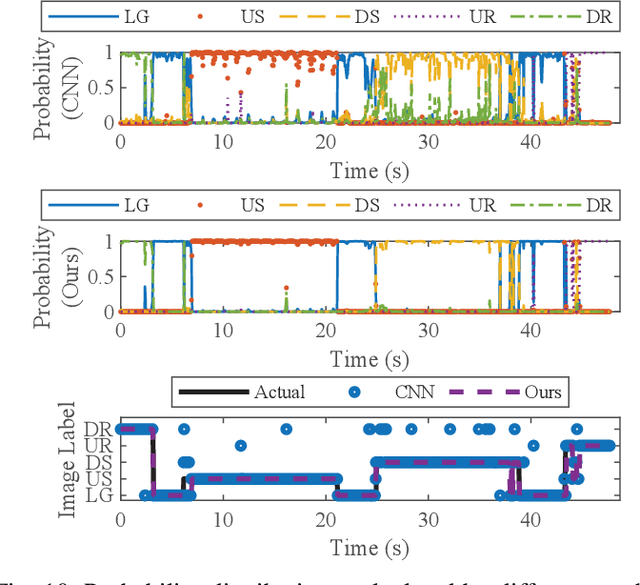
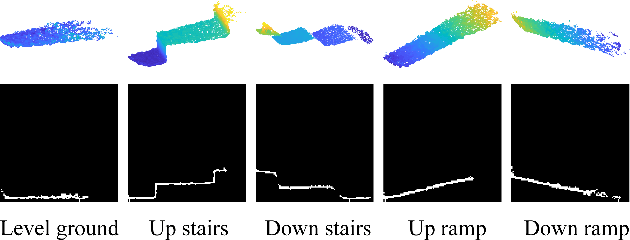
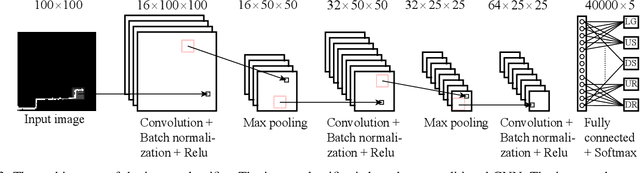
Powered prostheses are effective for helping amputees walk on level ground, but these devices are inconvenient to use in complex environments. Prostheses need to understand the motion intent of amputees to help them walk in complex environments. Recently, researchers have found that they can use vision sensors to classify environments and predict the motion intent of amputees. Previous researchers can classify environments accurately in the offline analysis, but they neglect to decrease the corresponding time delay. To increase the accuracy and decrease the time delay of environmental classification, we propose a new decision fusion method in this paper. We fuse sequential decisions of environmental classification by constructing a hidden Markov model and designing a transition probability matrix. We evaluate our method by inviting able-bodied subjects and amputees to implement indoor and outdoor experiments. Experimental results indicate that our method can classify environments more accurately and with less time delay than previous methods. Besides classifying environments, the proposed decision fusion method may also optimize sequential predictions of the human motion intent in the future.