 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic Histogram Based Graph Matching for Real-Time Multi-Robot Global Localization in Large Scale Environment
Paper and Code
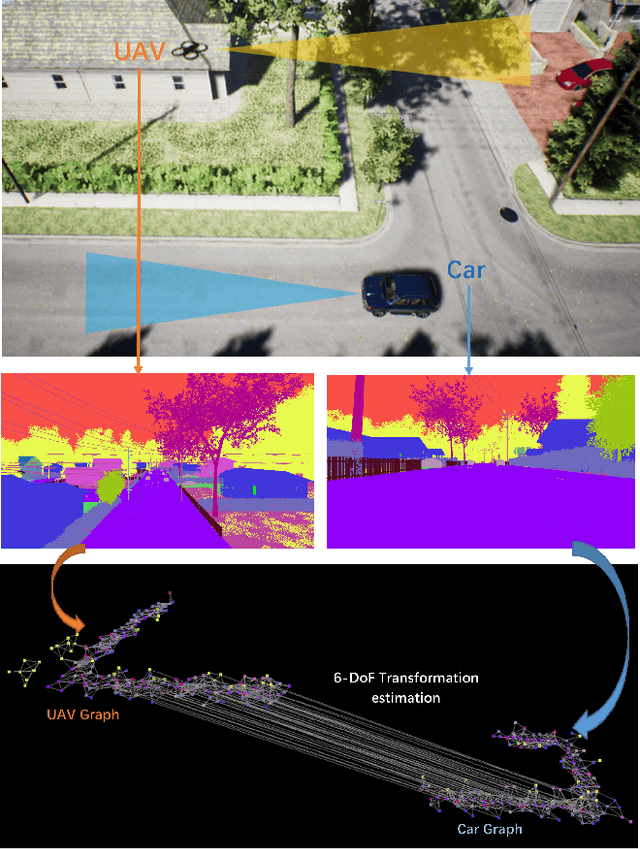
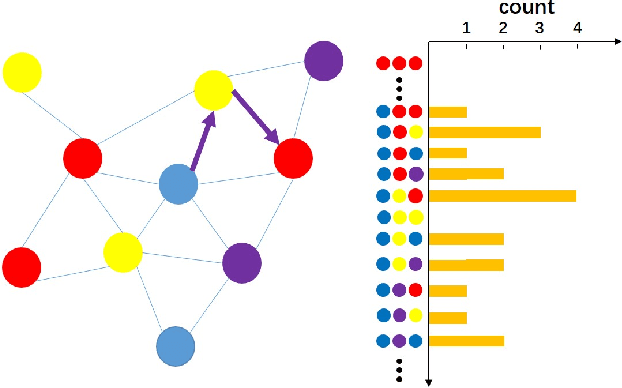
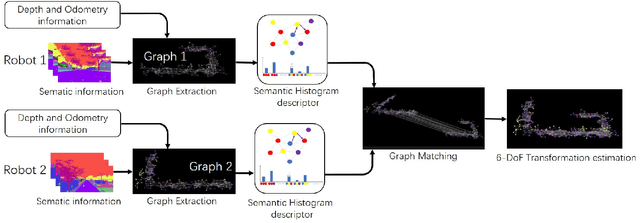
The core problem of visual multi-robot simultaneous localization and mapping (MR-SLAM) is how to efficiently and accurately perform multi-robot global localization (MR-GL). The difficulties are two-fold. The first is the difficulty of global localization for significant viewpoint difference. Appearance-based localization methods tend to fail under large viewpoint changes. Recently, semantic graphs have been utilized to overcome the viewpoint variation problem. However, the methods are highly time-consuming, especially in large-scale environments. This leads to the second difficulty, which is how to perform real-time global localization. In this paper, we propose a semantic histogram-based graph matching method that is robust to viewpoint variation and can achieve real-time global localization. Based on that, we develop a system that can accurately and efficiently perform MR-GL for both homogeneous and heterogeneous robots. The experimental results show that our approach is about 30 times faster than Random Walk based semantic descriptors. Moreover, it achieves an accuracy of 95% for global localization, while the accuracy of the state-of-the-art method is 85%.