 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSegmentation and Classification of EMG Time-Series During Reach-to-Grasp Motion
Paper and Code
Apr 19, 2021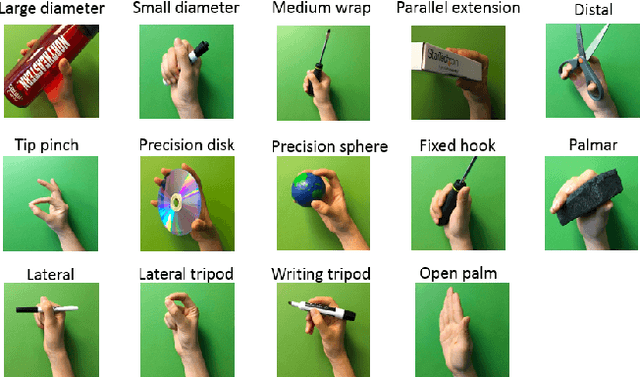
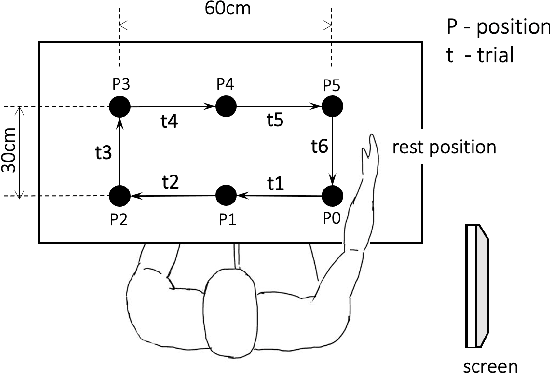


The electromyography (EMG) signals have been widely utilized in human robot interaction for extracting user hand and arm motion instructions. A major challenge of the online interaction with robots is the reliable EMG recognition from real-time data. However, previous studies mainly focused on using steady-state EMG signals with a small number of grasp patterns to implement classification algorithms, which is insufficient to generate robust control regarding the dynamic muscular activity variation in practice. Introducing more EMG variability during training and validation could implement a better dynamic-motion detection, but only limited research focused on such grasp-movement identification, and all of those assessments on the non-static EMG classification require supervised ground-truth label of the movement status. In this study, we propose a framework for classifying EMG signals generated from continuous grasp movements with variations on dynamic arm/hand postures, using an unsupervised motion status segmentation method. We collected data from large gesture vocabularies with multiple dynamic motion phases to encode the transitions from one intent to another based on common sequences of the grasp movements. Two classifiers were constructed for identifying the motion-phase label and grasp-type label, where the dynamic motion phases were segmented and labeled in an unsupervised manner. The proposed framework was evaluated in real-time with the accuracy variation over time presented, which was shown to be efficient due to the high degree of freedom of the EMG data.