 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScale Estimation with Dual Quadrics for Monocular Object SLAM
Paper and Code
Feb 10, 2022

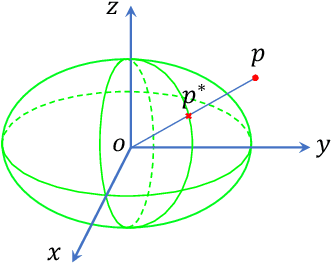

The scale ambiguity problem is inherently unsolvable to monocular SLAM without the metric baseline between moving cameras. In this paper, we present a novel scale estimation approach based on an object-level SLAM system. To obtain the absolute scale of the reconstructed map, we derive a nonlinear optimization method to make the scaled dimensions of objects conforming to the distribution of their sizes in the physical world, without relying on any prior information of gravity direction. We adopt the dual quadric to represent objects for its ability to fit objects compactly and accurately. In the proposed monocular object-level SLAM system, dual quadrics are fastly initialized based on constraints of 2-D detections and fitted oriented bounding box and are further optimized to provide reliable dimensions for scale estimation.